
- 面议
起订量:
德国西锁WESTLOCK西索2649S-SPVECL-10
- 型号
- 参数
- 供货周期:一个月以上

该企业相似产品

上海壹侨贸易有限公司是中国工业控制自动化领域的服务贸易商,德国分公司(AOI Solutions GmbH -- Age of Innovation)位于德国汉堡,专业从事各种国外工控自动化产品的进口贸易。主要经营欧洲各国的高精密编码器、传感器、仪器仪表、阀门、泵、电机以及各类自动化产品。公司发展目标是成为国内的欧洲自动化仪器仪表,备品备件供应商。我们直接与欧洲厂家或者厂家代理商联系,提供100%原装正品,真正做到让客户满意,采购放心。
公司部分优势品牌:
美国MOOG伺服阀,泵等;
德国 BEDIA水平传感器,温度传感器
德国 LENORD BAUER(兰宝)编码器、传感器
德国 BARKSDALE(巴士德)传感器、开关;
德国 JAHNS(雅恩斯)液压马达,分配器等
德国 SWAC控制面板;
德国 SIBRE制动器;
德国 HUBNER(霍伯纳)编码器 ;
德国 NEIDLEIN机床
德国 KOBOLD(科宝)流量计,流量开关,压力开关,液位开关等
德国 ZIEHL-ABEGG(施乐百)风机,风扇;
德国 PHOENIX(菲尼克斯)继电器插头
德国 MAHLE(马勒)滤芯,过滤器;
德国 SVENDBORG 制动器,离合器;
德国 ABB-STORZ气缸; ABB-JOKAB
德国 TIPPKEMPER 传感器、光电开关、接近开关、光电管等;
德国 VEM电机;
德国 VSE流量计;
美国 NEXEN刹车片,离合器,制动器,摩擦片等;
瑞士 MONTECH气缸;
瑞士 METO-FER 接近开关;
西班牙LIFASA电容器(LIFASA电解电容)等;
意大利 ROLLON导轨,滑块,轴承;)
奥地利KRAUS&NAIMER转换开关
意大利HOHNER编码器 SITEMA制动器
德国DEMAG模块 电机
德国PAULY光栅
德国雄克SCHUNK卡爪 夹具
SMW夹具* TURCK 图尔克 LAPP*
B&R BUCHER阀门 M&C烟气分析仪
ZIEHL-ABEGG 施乐百 RITTAL威图 SSB电机 STOBER电机
以上只是一部分品牌,我们欧洲的中小品牌基本都能操作。
详细信息
WESTLOCK EL-020602UK
WESTLOCK 2649S-SPVECL-10
WESTLOCK 2645ABYN0CS22FAN-AR2 整单有效
WESTLOCK C3479-NO-W300更新的部件号34793B2M06
WESTLOCK STK3001985 - 2004NBY2A2M0200U
WESTLOCK 3349ABYN0CS22FAN-AR1
WESTLOCK 停产2007SBY2B2M04CS相同规格产品的新零件编号。
WESTLOCK 2649ABYN00022FANAR2
WESTLOCK STK3001985 - 2004NBY2A2M0200U
WESTLOCK 停产2007SBY2B2M04CS相同规格产品的新零件编号。
WESTLOCK 3349ABYN0CS22FAN-AR1
德国西锁WESTLOCK西索2649S-SPVECL-10 德国西锁WESTLOCK西索2649S-SPVECL-10
机械手由结构框架、X轴组件、Y轴组件、Z轴组件、工装夹具以及控制柜,六部分组成。
其中:
1,结构框架,主要由立柱等结构件组成,其作用是将各轴架空至一定高度,多由铝型材或方管,矩形管,圆管等焊接件构成;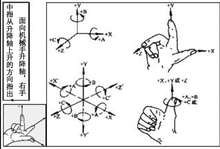
2,X轴组件、Y轴组件、Z轴组件,三个运动组件为桁架机械手的核心组件,其定义规则遵循笛卡尔坐标系[1] 。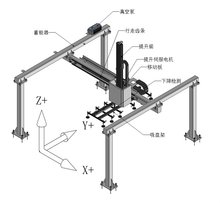
各轴组件通常由结构件、导向件、传动件、传感器检测元件以及机械限位组件等五部分组成。
1),结构件通常由铝型材或方管,矩形管,槽钢,工字钢等结构组成,其作用是作为导向件、传动件等组件的安装底座,同时也是机械手负载的主要承担者。
2),导向件,常用有直线导轨,v型滚轮导轨,U型滚轮导轨,方型导轨以及燕尾槽等常用导向结构,其具体运用需根据实际使用工况以及定位精度决定。
3),传动件,通常有电动,气动,液压三种类型,其中电动有齿轮齿条结构,滚珠丝杠结构,同步带传动,链条传统以及钢丝绳传动等。
4),传感器检测元件,通常两端采用行程开关作为电限位,当移动组件移动至两端限位开关处时,需要对机构进行锁死,防止其超程;此外还有原点传感器以及位置反馈传感器。
5),机械限位组,其作用是在电限位行程之外的刚性限位,俗称死限位。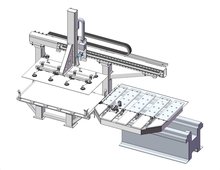
3,工装夹具,根据工件形状大小材质等有不同形式,如:真空吸盘吸取,卡盘夹取,托取或针式夹具插取等形式。
4,控制柜,其相当于与桁架机械手的大脑作用,通过工业控制器,采集各传感器或按钮的输入信号,来发送指令给个执行元件按既定动作去执行。
折叠编辑本段产品特色
其特点:
1,高效--------其各轴以*的速度直线运行,可用伺服电机快速响应;
2,稳定-------极小的重复性误差,最高可达0.05mm;
3,高强度------7x24小时工作,不需要吃饭、睡觉、抽烟等;
4,高精度------定位精度可达0.02mm(基于制作成本原因,可根据使用工况适当放大定位精度);
5,性价比高------相比关节机器人,其负载重量大,制作成本低,适合于"中国智造"基本国情;
6,作简单------基于直角坐标体系,其运动参数较为简单。
发展历史
机械手首先是从美国开始研制的,其在国外有较完善的运用。
1958年美国联合控制公司研制出*台机械手。
它的结构是:机体上安装一个回转长臂,顶部装有电磁块的工件抓放机构,控制系统是示教形的。
1962年,美国联合控制公司在上述方案的基础上又试制成一台数控示教再现型机械手。商名为Unimate(即万能自动)。运动系统仿照坦克炮塔,臂可以回转、俯仰、伸缩、用液压驱动;控制系统用磁鼓作为存储装置。不少球坐标通用机械手就是在这个基础上发展起来的。同年,美国机械制造公司也实验成功一种叫Vewrsatran机械手。该机械手的中央立柱可以回转、升降采用液压驱动控制系统也是示教再现型。这两种出现在六十年代初的机械手,是后来国外工业机械手发展的基础。
1978年美国Unimate公司和斯坦福大学,麻省理工学院联合研制一种 Unimate-Vicarm型工业机械手,装有小型电子计算机进行控制,用于装配作业,定位误差小于±1毫米。联邦德国KnKa公司还生产一种点焊机械手,采用关节式结构和程序控制。
机械手控制系统发展历史
机械手控制系统首先是从美国开始研制的。1954年美国戴沃尔最早提出了工业机器人的概念,并申请了。该的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现。这就是所谓的示教再现机器人控制系统。现有的机器人控制系统差不多都采用这种控制方式。1958年美国联合控制公司研制出*台机械手铆接机器人控制系统。作为机器人产品最早的实用机型(示教再现)是1962年美国AMF公司推出的"VERSTRAN"和UNIMATION公司推出的"UNIMATE"。这些工业机器人和相关控制系统主要由类似人的手和臂组成它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机械手控制系统经历了以下几个阶段:机械手完成放射源转运年代、化工产品垛机械手年代、工业用机械手兴起和发展年代。
随着汽车行业和塑胶行业的发展,西欧、日本、苏联和中国等地域机械手及其控制系统也开始百花争放。
尤其注塑机机械手,发展更为迅猛,应用非常普遍,其控制系统经过几十年的发展,现在已经趋于成熟和完善。
机械手控制系统的流派及品牌(塑胶)
注塑机机械手流派控制系统可以按地域划分为欧美类,日本类,中国类。欧美和日本发展较早,技术相对较为完善。国产机械手控制系统起初主要是引进国外,但近一二十年来中国在这一方面的开发研究生产可谓是突飞猛进,如今国产机械手控制系统已逐步成熟,且国产价格相对比较低。中国的有中国台湾天行、大陆华成工控,欧洲西格玛泰克、KEBA、日本星机和哈默。
机械手控制系统的种类是根据硬件的不同而加以分类的,主要有斜臂、横走,按驱动方式可分为气动、变频、伺服。每个大类又有数个小种,而不同的小种又因不同的动作程序而不同。
斜臂机械手控制系统用于500T以下注塑机,动作程序有二三十套,最高距离精度可达到0.05mm,横走机械手控制系统用于1600T内注塑机动作程序有四五十套,最高距离精度可达到0.05mm,而超大型注塑机则需配专门的控制系统 。
折叠编辑本段系统组成
(注塑机机械手斜臂套)
工业机械手控制系统一般包括主控板、转接板、显示器、控制按键、配套电源等部分。下面主要针对工业机械手控制系统做下介绍。
主机
主机包括主控板,显示屏,按键。其中主控板由单片机和相应电路板组成,单片机负责程序运行,电路板处理输入输出信号。(图左)
转接板
转接板主要包含一些端子和继电器,其功能是信号的转接。 (图上中)
配套电源及其他
电源用于控制系统供电,如蜂鸣器则是用于机器故障报警所用。
折叠编辑本段系统前瞻
现代计算机技术的产业革命,将世界经济从资本经济带入到知识经济时代。在电子世界领域,从20世纪中的无线电时代也进入到21世纪以计算机技术为中心的智能化现代电子系统时代。而机械手控制系统则逐步发展为与计算机互联,使机械手控制系统更加智能化,作更加简单方便。
随着自动化的发展,机械手(机器人)应用将更加普遍。而没有控制系统的机械手却是一堆废铁,机械手的发展势必与控制系统双驹并驰。而日后机械手的发展也会受限于控制系统的发展,未来的人类社会将是机械手的时代。





