
差压变送器的原理以及在玻璃生产线中的应用
时间:2019-01-21 阅读:987
变送器是现代化工业生产中普遍在使用的一类仪表设备,可以被称为现代工业生产的“眼睛”,生产流程中可以通过变送器来观测与控制整个生产过程的压力、流量、温度、液位等测量数据,并通过数据交换的方式将此类数据传递到*控制系统内(DCS或PLC)中的逻辑算法,同时以调节器或控制单元来进行调节,终完成对生产的各项目标数值的控制。因此说变送器对于建立一个良好的控制回路是重要前提要求,压力变送器和差压变送器就是这种“眼睛”典型的代表,以其高精度和和稳定性被广泛应用。

1、分 类
压力(差压)变送器的作用,简单来说就是通过弹性测压元件的位移或受力变为标准电信号。按组成方式及工作原理可分为力平衡式变送器和位移式变送器两类。而在玻璃生产线中,我们基本均使用位移式变送器。其中按照测量精度和对象又可分为微差压变送器、差压变送器和压力变送器三类。若按照信号传输和供电模式又可分为两线制变送器和四线制变送器两种。
2、原 理
2.1 力平衡式压力(差压)变送器
虽然力平衡式变送器在玻璃生产线中并不多见,但为了比较它与位移式变送器之间的优劣,仍值得研究讨论。其工作原理如图1所示。被测压力P经波纹管转换为力Fi作用于杠杆左端A点,使杠杆绕支点O作逆时针旋转,稍一偏转,位于杠杆右端的位移检测元件便有感觉,使电子放大器产生一定的输出电流I0。此电流流过反馈线圈和变送器的负载,并与磁铁作用产生一定的电磁力,使杠杆B点受到反馈力Ff,形成一个使杠杆作顺时针转动的反力矩。由于位移检测放大器极其灵敏,杠杆实际上只要产生极微小的位移,放大器便有足够的输出电流形成反力矩与作用力矩平衡。当杠杆处于平衡状态时,输出电流I0正比于被测压力P。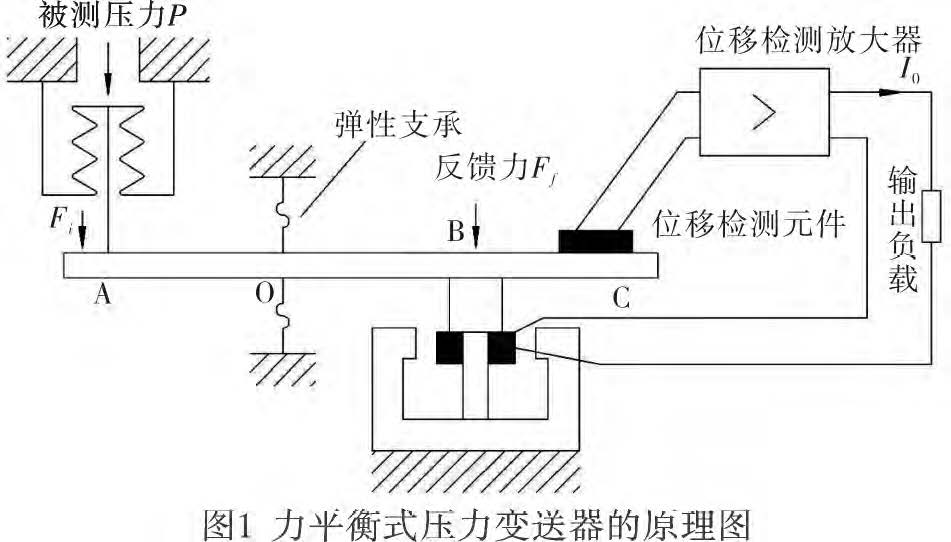
这种闭环的力平衡结构的优点,首先在于当弹性材料的弹性模数温度系数较大时,可以减小温度的影响。因为这里的平衡状态不是靠弹性元件的弹性反力来建立的,当位移检测放大器非常灵敏时,杠杆的位移量很小,若整个弹性系统的刚度设计得很小,那么弹性反力在平衡状态的建立中无足轻重,可以忽略不计。这样,弹性元件的弹性力随温度的漂移就不会影响这类变送器的精度。此外,由于变换过程中位移量很小,弹性元件的受力面积能保持恒定,因而线性度也比较好。由于位移量小,还可减少弹性迟滞现象,减小仪表的变差。为了说明上述道理,可画出这种变送器的静态结构如图2所示。北侧压力P乘上波纹管的有效面积S便得到作用于A点的Fi,此力再乘上对支点O的距离lOA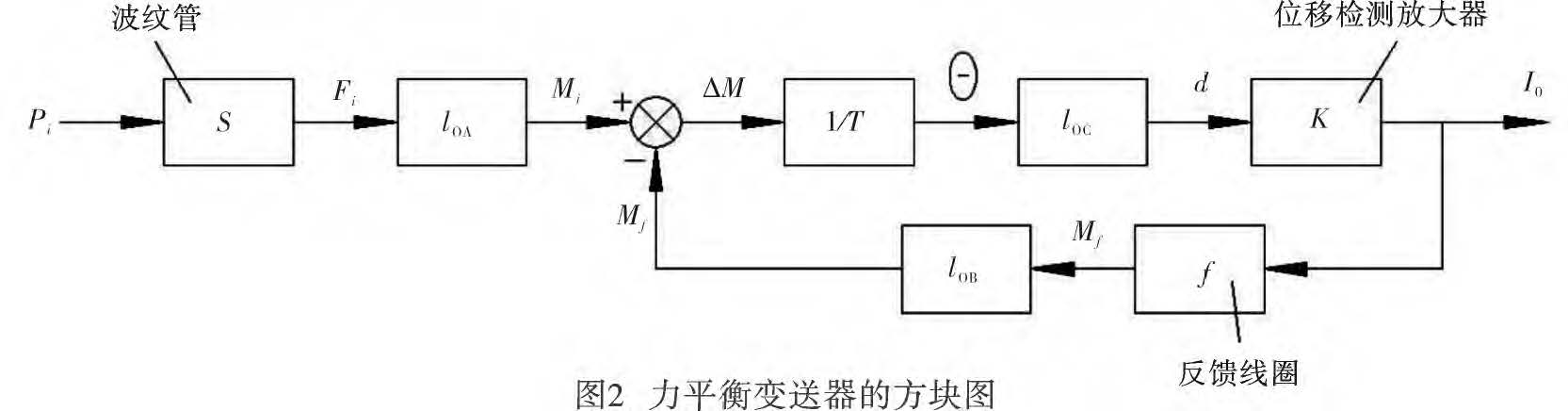
即为作用力矩Mi=Fi×lOA作用力矩Mi与反馈力矩Mf之差ΔM使杠杆绕O点旋转,转角θ=Δm/τ。这里τ是杠杆系统的扭转刚度,它的大小表示要使杠杆产生单位转角所需的力矩。当杠杆转动时,位移检测点C处就有位移d=lOC×θ,其中lOC为检测点C到支点O的距离。该位移被检测并转换为电流输出I0。
图中K表示位移检测放大器的传递系数。输出电流I0流过反馈线圈,产生电磁反馈力Ff=f×I0,其中f为电磁铁的传递系数。此力乘力臂lOB即为反馈力矩Mf。
由图2可写出其闭环传递函数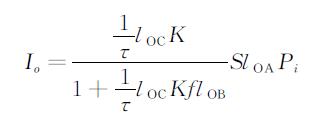
当开环增益很大,即1τ×lOC×K×f×lOB>>1时,上式可简化为 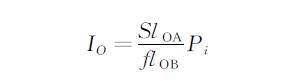
由此可知,这种变送器具有一切闭环系统的共同特点,即在开环增益足够大时,其输入量与输出量间的关系只取决于输入环节及反馈环节的传递函数,而与正向通道环节的传递函数无关。在图2中,杠杆系统(包括弹性测量元件)的刚度τ和位移检测放大器的传递系数K都处于正向通道内,只要开环增益足够大,它们的变化不会影响输出值I0。因此,弹性测量元件的弹性模数随温度的变化,不会影响仪表的精度[1]。从上面的分析看到,在力平衡变送器中,只要测压元件的有效面积S能保持恒定,磁铁的磁场强度均匀稳定,力臂的长度lOA、lOB不变,便可得到较好的变换精度。
2.2 位移式差压(压力)变送器
早的电信号压力计都是开环的,先将弹性测压元件的位移转换为电感、电阻或电容的变化,再经一定的电路转换后输出。由于当时材料质量和工艺水平都不高,弹性元件的弹性模数随温度变化很大,因而平衡位置受温度影响大,即输出的温度漂移较大。另外,早期的位移测量技术不高,测压元件必须有足够大的变形才能测量,因而使弹性元件的非线性和变差都比较大。随着科学技术的发展,材料弹性模数随温度变化的问题获得了很大的改善,例如镍铬钛钢等材料的弹性模数温度系数小于0.2×10-4℃-1,因而在环境温度变化时,其弹性模数几乎可认为不变。此外,电子检测技术的发展,使微小位移的检测成为可能,弹性元件只要有0.1mm左右的位移便可地测量出来。由于变形小,非线性和弹性迟滞引起的变差都可以大大减小。而其结构的简单,运行的可靠,维护的方便,都是位移式变送器相较于力平衡式的优点所在。作为这种新的位移式变送器的例子,图3示出了一个电容式差压传感器的基本结构。被测压力P1、P2分别加于左右两个隔离膜片上,通过硅油将压力传送到测量膜片。该测量膜片由弹性温度稳定性好的平板金属薄片制成,作为差动可变电容的活动电极,在两边压力差的作用下,可左右位移约0.1mm的距离。在测量膜片左右,有两个用真空蒸发法在玻璃凹球面制成的金属固定电极。当测量膜片向一边鼓起时,它与两个固定电极间的电容量一个增大,一个减小,通过引出线测量这两个电容的变化便可知道差压的数值。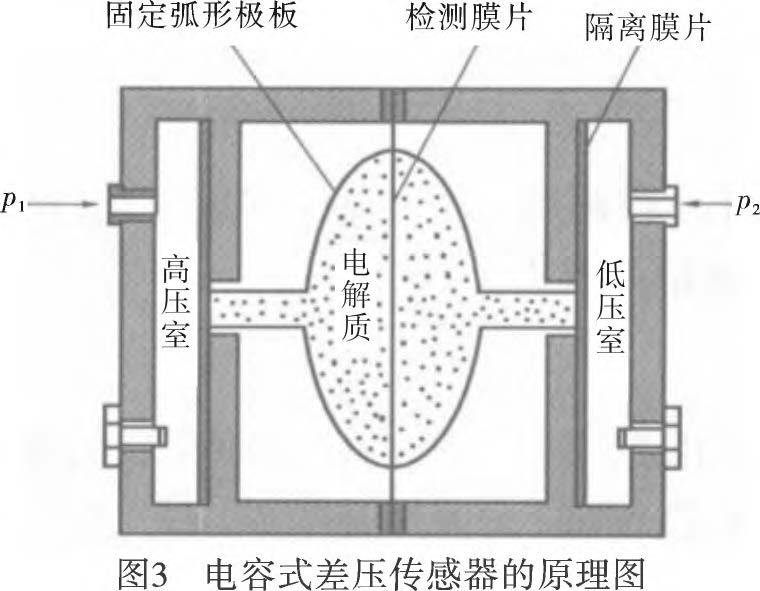
这种差压变送器的结构和力平衡式相比有一突出的优点,就是它不存在力平衡式变送器必须把杠杆穿出测压室的问题。在力平衡式变送器中为使输出杠杆既能密封又能转动,使用了弹性密封膜片,这带来一个棘手的问题———静压误差。由于密封膜片在压力作用下的变形,会使杠杆产生轴向位移,必须用吊带把杠杆拉住,但它容易产生偏心。此外,杠杆在密封膜片上的安装也很难*同心,这样,弹性密封膜片受力时,还会对杠杆造成附加的偏转力。尽管两个测量室的压力差为零,即P1-P2=0时,只要P1、P2的值不为零,杠杆上就会受到偏转力,由这种附加力引起的误差就称为静压误差。在力平衡式差压变送器中,这是一个十分麻烦的问题。在图3的电容式传感器中,因为没有输出轴,所以静压误差的问题比较容易解决,整个差压变送器的精度也容易提高。要了解电容式变送器的工作原理,就需要先分析下差动电容与压力的变化关系,设测量膜片在差压P的作用下移动一个距离Δd,由于位移很小,可近似认为两者作比例变化,即可写成:Δd=K1P,这里K1为比例常数。这样,可动极板(测量膜片)与左右固定极板间的

式中,K2是由电容器极板面积和介质介电系数决定的常数。联立解上列关系式,可得出差压P与差动电容C1、C2的关系如下
这里K3=K1/d0也是一个常数。由上式可知,电容式压力变送器的任务其实就是将(C2-C1)对(C2+C1)的比式转换为电压或电流。
3 应 用
综上所述,我们认识到位移式变送器在现今的测量领域,相对于力平衡式变送器而言更为市场所认可。在玻璃生产线的设计过程中也同样如此。然而根据测量对象和精度的不同,变送器在选型上仍有区别。
1)在熔窑中,我们使用精度高的微差压变送器检测窑内压力,这是关乎熔窑根本安全和测量对象之一,其结构如图4所示,此处P1的取压管需深入熔窑壁内侧,而P2所取压力为温度接近熔窑处的大气压值,终接入变送器的取压管应为窑炉两侧取压的平均值,后同图3位移式变送器的原理,通过P1-P2得到熔窑内部的表压值。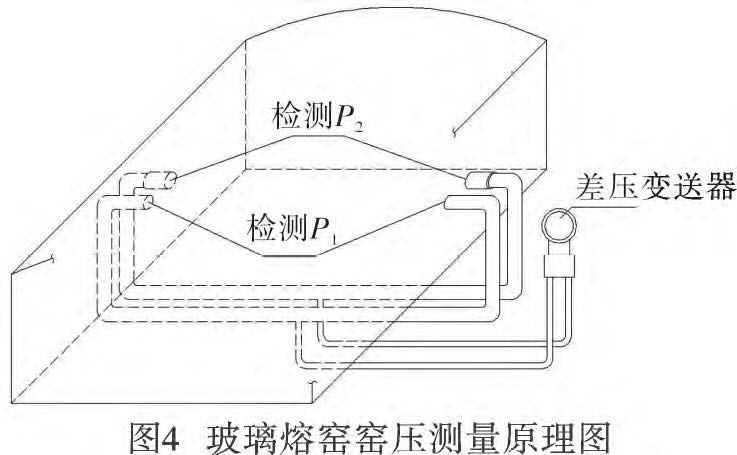
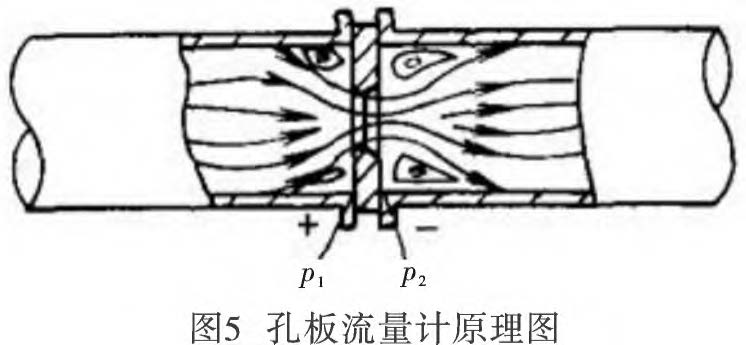
2)对天然气、氢气、氧气以及助燃风流量的测量,我们使用差压变送器配合节流式孔板流量计来实现。如图5所示在管道中插入一片中心开孔的圆盘,当流体经过这一孔板时,流束截面缩小,造成了局部的流速差异,得到比较显著的压差。在一定的条件下,流体的流量与节流元件前后的压差平方根成正比。其公式为式中,Q是所测流量;F0是孔板的开孔面积;α为流量系数;ρ为液体密度;P1为孔板前压力;P2为孔板后压力。在玻璃生产线中,差压变送器除了在上述关键测量领域起到重要作用之外,仍有许多衍生的应用,比如测量玻璃液面的高度变化,测量液体的液位高度等等,此处不再多做赘述。
4、发 展
在检测气体流量时,由于气体具有可压缩性,因此比液体的测量更复杂。由上文可知,气体的体积流量Q是差压(P1-P2)与密度ρ的函数,而密度又是该气体当前温度和压力的函数,实际使用时,由于介质的当前密度与设计时的密度不同,会出现较大的测量误差,因此要对其进行温压补偿。过去,设计者会在气体管道设置流量计的位置附近同时设置热电阻和压力变送器,并将三组信号均引入DCS系统,在计算机系统中通过公式完成补偿计算。这种模式在现今也逐渐被取代。不少公司研发出了新一代的多参数智能变送器,这类变送器以微处理器为基础,全面提升了变送器的精度、可靠性及长期稳定性指标。通过同时分别检测温度、压力和差压三个过程变量,按工业标准的计算方法直接得出第四个过程变量(质量流量或体积流量),并输出对应的4~20mA模拟信号和数字信号,减少了变送器的数量,方便了安装,使其能满足更为苛刻的使用环境,提高了可靠性和测量准确度。
5、结 语
时至今日,差压变送器在工业领域的应用早已不再局限于测量压力,该文所提到的对流量、液位的测量是将被测对象的变化先转换为压力差,再通过变送器完成测量,这些设计无一不饱含着设计者的智慧结晶,都值得我们去思考和继续研究。