机器人爪取3D扫描设备介绍
时间:2017-12-16 阅读:2901
3D扫描技术概述
*科致致力于为工业客户提供个性化的三维图像处理产品与解决方案,帮助制造业客户控制成本、提升质量、改善效率、提高智能化程度,从而提高客户的市场竞争力!
*激光三角测量系统基于三角测量原理的双目立体视觉系统,利用该系统可以快速地对零件进行三维定位。该系统可成功运用到包括汽车、家电、3C、机械、航空、航天等行业的自动化生产线中。
*其技术已成功运用在三大领域:
应用类型1(拾取和放置)
应用类型2(表面扫描)
应用类型3(几何测量)
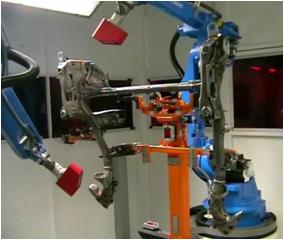
应用领域1(拾取和放置-发动机顶盖)
*传感器被集成安装在机器人的夹具上,被测组件被放置在吸塑托盘中,其放置的位置精度无法满足机器人准确夹取的要求。此时,由机器人引导传感器扫描整个组件的放置区域,确定组件X方向和Y方向位置后,将数据通过以太网连接传输到机器人系统中对组件进行的夹取。


机器人引导传感器扫描制动盘,评估zui上层制动盘的位置,再利用传感器扫描得到的准确位置,由机器人端部夹具卸载特定的制动盘到后序工位。
应用领域2(表面扫描-表面质量检测)
*利用多个传感器同时对复杂零件的表面进行扫描,检测零件的表面质量。

传感器固定在输送线的上端,对通过的肉品进行表面扫描,获得肉品的表面形状数据,在系统中分析。通过控制输送线的传输和切刀的动作实现等重切片。
应用领域3(几何测量)
*利用多个传感器同时对复杂零件的表面进行扫描,检测零件的表面质量。

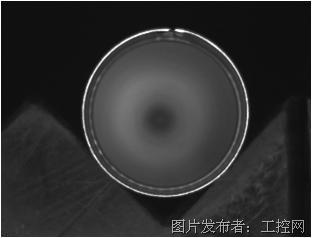
使用传感器对AAA电池套进行扫描。检查圆形的负极边缘,分辨其边缘形状是否满足要求。可达到每秒15件的检测速度。
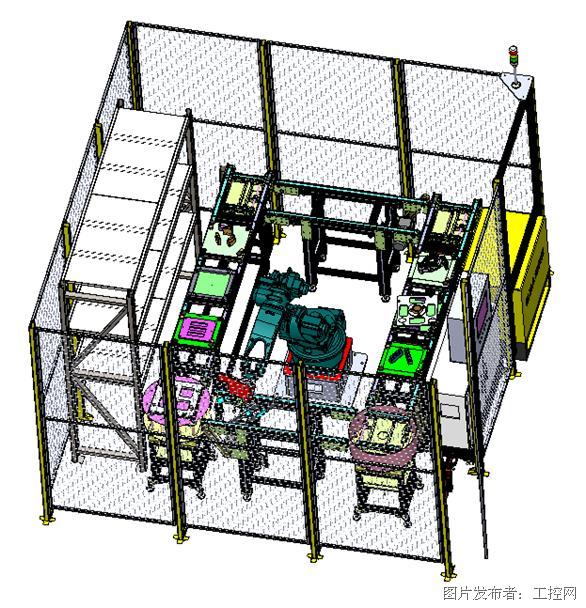
机器人爪取3D扫描设备工艺
一.功能要求:
1.结合机器人自动3D扫描、自动找正产品、自动爪取、自动定位下料等功能.
2.设备动作时间节拍:10-15s.
3.设备具备2级安全防护.
4.设备只需求1人辅助设备作用。
5.维护简单,性能稳定,自动取料、下料稳定可靠。
二.操作步骤:
1.准备工作,人工将三款产品(长方形塑料件、托盘工装、铝铸件)任意摆放到
相应的托盘工装上;
2. 人工离开设备围栏,按下设备起动按扭;
3. 机器人自动移动产品上方,3D扫描传感器扫描产品方向,机器人自动校正位置
爪取相应产品,机器人把产品放到线体另一个位置的产品定位夹具里面。
4.三款产品,设备重复以上动作。
三.主要电气元件品牌
1、气动元件:FESTO/SMC
2、PLC 触摸屏:西门子
3、电器 按钮等:施耐德
4、传感器等:OMRON
机器人爪取3D扫描设备方案
外形布局图
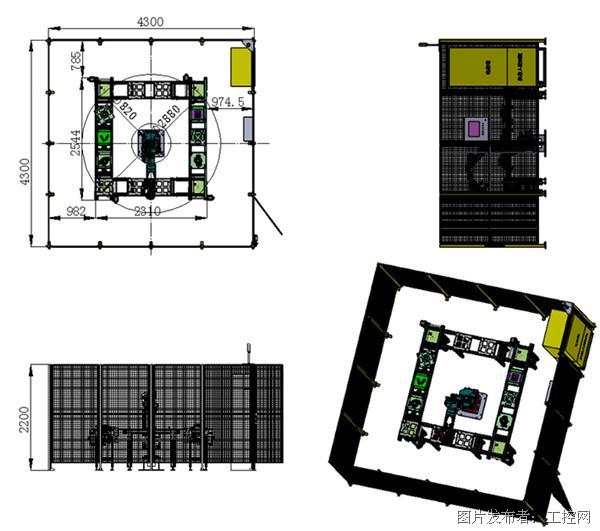
机器人爪取3D扫描设备方案
设备总布局介绍