
模拟天然心肌的心脏微组织的直接3D生物打印
时间:2022-10-25 阅读:1027
抽象
心脏具有复杂的三维(3D)层流肌纤维组织;然而,由于工程生理相关的3D组织仍然是一个技术挑战,心肌细胞比对激发 - 收缩耦合,缩短和力发展的影响尚未得到系统研究。3D中的细胞形状和方向可以通过工程支架微观结构和封装这些几何线索附近的细胞来控制。在这里,我们展示了一种通过微尺度连续光学打印(μCOP)图案化在3D甲基丙烯酸明胶(GelMA)支架中的细胞包封的新方法可以快速在可光交联的水凝胶中快速显微模式新生小鼠心室心肌细胞(NMVCMs)。封装的心肌细胞优先与工程微结构对齐,并且可以显示体内心肌的形态和肌原纤维取向表型。利用μCOP系统,直接印刷一个不对称的,多材料的,基于悬臂的脚手架,使微组织产生的力被传递到单个可变形的柱子上。与对齐的 2D 种子样品相比,对齐的 3D 封装 NMVCM 支架产生的力几乎是其 2 倍。为了进一步突出μCOP的灵活性,NMVCMs被封装在几种模式中,以比较不同程度的对齐对组织位移和同步性的影响。良好对齐的肌纤维培养模式产生的收缩力是各向异性模式较少的结构的4-10倍。最后,NMVCM包封结构的归一化氟-4荧光显示出特征性的钙瞬态波形,在用100 nM异丙肾上腺素治疗期间,钙瞬态波形的幅度和下降速度增加。这种新型的仪器化3D心脏微组织作为生理相关的体外模型系统,在心脏病建模和药物筛选中具有巨大的应用潜力。
材料和方法
机械测试
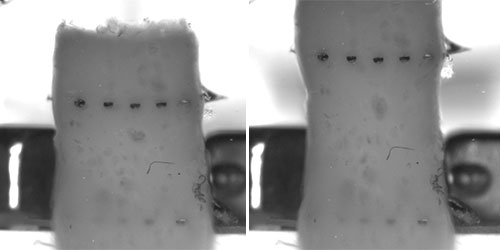
利用μCOP系统聚合直径1 mm×2 mm高的各向同性圆柱体,并在37°C下膨胀1,10和31天。使用细cellscale的Microtester进行压缩测试。将样品在37°C的DPBS浴中孵育。 实验参数包括1分钟内施加的100 μN的力速率。使用光束方程 [27] 计算力:
3×易
其中D是位移,F是力,L是梁的长度,E是模量。我圆柱体由以下机构给出:
其中 r 是光束的半径。
在应力-应变曲线的线性区域内,在 5–15% 的凝胶、2% 的 HAGM/2% PEGDA 的条件下测定压缩模量。
力测量
为了确定3D打印的微组织产生的力,使用Mcrotester吸管测量了三个级别的打印:15%GelMA独立式支柱,没有细胞的三组分支架(无细胞),以及带有封装NMVCMs的三组分支架。将独立式和非细胞支架在37°C 5%CO下孵育2在 DPBS 中,使用 1% 抗生素 1% 抗真菌药物。在第1天,第10天和第30天测量样品,并将其放在侧面并在室温下浸没在DPBS浴中。使用钨丝束压制样品,测量从底座施加的力点。将样品置换20μm,并使用等式1和2测量的力来计算样品模量[27]:
其中ω是位移,F是力,γ是几何模量,I是2断续器惯性矩(长方体),L是高度,x是施加力的高度。
其中 h = 长度,b = 宽度。
最后,将NMVCM封装的样品浸没在37°C的无钙和40 mM 2,3丁二酮单肟(BDM)的Tyrode溶液浴中,以充分松弛3D打印的微组织。使用钨丝束压制样品,测量从底座施加的力点。为了确定支架内细胞的影响,将样品置换20μm并测量如前所述的力。使用方程式3和4,使用松弛的细胞支架的模量,根据视频的测量位移计算对齐组织的力。
本次测量的步骤为:
| 直径1 mm,高2 mm的各向同性圆柱,在37℃下膨胀1、10和31天。 压缩测试,37℃ DPBS,1 min内施加到100 μN: D = F×L3 / 3×E×I,D是位移,F是力,L是梁的长度,E是模量; I = πr4 / 4,r是梁的半径 通过应力-应变曲线的线性区域,确定5-15%GelMA和2%HAGM/2%PEGDA压缩模量 |
Mi
MT G2
压缩、拉伸、弯曲、压痕和剪切测试的测试模式
0.1μm分辨率的高精度压电执行器
可选双轴成像
解像力降至10nN
高分辨率的CCD成像
集成温控介质浴
功能齐全的用户界面软件,可进行实时反馈的简单、循环、松弛和多模式测试
Mi
MT LT
压缩、拉伸、弯曲和压痕测试的测试模式
适合测各种不同的应用,并且价格公道
1μm分辨率的高精度压步进马达
解像力降至10nN
高分辨率的CCD成像
集成温控介质浴
功能齐全的用户界面软件,可进行实时反馈的简单、循环、松弛和多模式测试


试样和安装

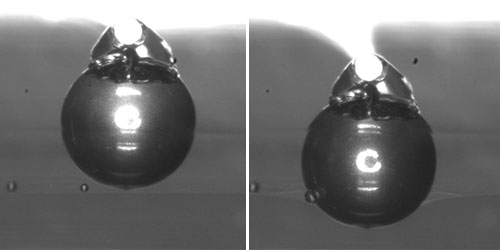
样品:300μm水凝胶微球(30KPa)
峰力:20mN
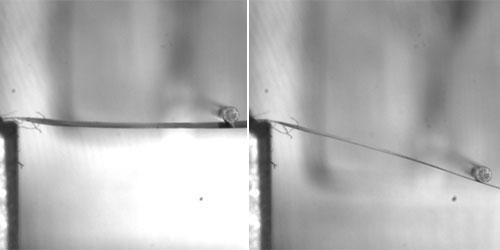
试样:20μm厚、4mm宽箔带(70MPa)
峰力:3mN
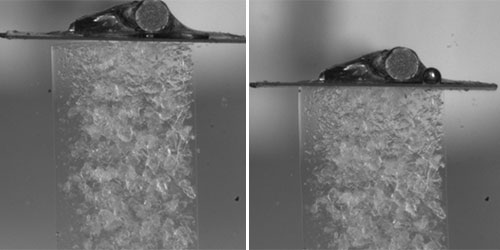
标本:直径2毫米的水凝胶圆柱体(12KPa)
峰力:20mN
样品:1.5mm直径压头压入水凝胶(2KPa)
峰力: 12mN
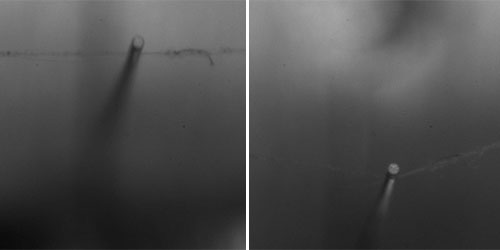
标本:蜘蛛丝
峰力:2mN
样品:3.5mm宽,1.5mm厚的水凝胶(0.5KPa)
峰力:1.4mN
视频




技术信息
| MTG2 | MTLT | |
| 外形尺寸 | 56 X 14 X 24cm | 52 X 17 X 21cm |
| 重量 | 9kg | 6.5kg |
| 力度大小 | 500mN | 500mN |
| 可用的力传感器 | 0.005, 0.02, 0.08, 0.2, 1, 5, 25, 100, 500mN | 0.005, 0.02, 0.08, 0.2, 1, 5, 25, 100, 500mN |
| 力的准确性 | 约换能器容量的0.2% | 约换能器容量的0.2% |
| 最大夹点分离 | 约10mm | 约10mm |
| 最大速度 | 5mm/s | 5mm/s |
| 最大循环频率 | 0.1Hz | 0.1Hz |
| 最大数据频率 | 5Hz | 5Hz |
| Actuator Technology | Piezo-electric Motor | Stepper Motor |
| Actuator Resolution | 0.1um | 1um |
| Range of Field of View | 0.4-11.0mm | 0.8-5.5mm |
| Vertical Image Resolution | 2048px | 1536px |
| Secondary Camera Option | Yes | No |
| Secondary Test Axis Option (Shear) | Yes | No |