什么是导波雷达液位计
导波雷达液位计工作原理
导波雷达液位计在检测液位时采用的是时域反射(TDR)原理,信号的传输介质是同轴电缆和导波杆,可以认为导波雷达液位计进行液位检测是基于传输线的特性的。以下简要介绍 TDR 的原理。
同轴电缆和导波杆是比较常用的信号传输线,我们可以把它等效为理想的双导线传输线,由相同的很多小的部分组成,每个小的部分又由很多的电阻 R、电容C、电感 L 和电导 G 等元件一起组成,并且同轴电缆和同轴导波杆的特性阻抗在每处都是一样的。
同轴电缆等效传输线原理图如图 2-1 所示。
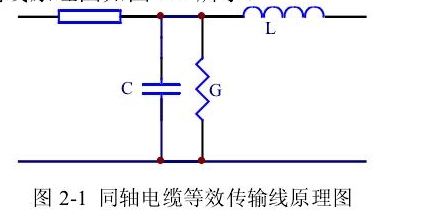
图 2-1 同轴电缆等效传输线原理图
由上图知道,如果同轴电缆与其他介质相接触,由于介电常数(这里用rε 来表示)是不同的,会使相接触部分的等效阻抗发生一定变化。当同轴电缆的某一端发射出脉冲信号时,脉冲信号会沿电缆进行传输。如果传输中没有与其他介质的接触时,那么对应的负载阻抗和电缆的特征阻抗相等,那么脉冲会被吸收因此没有回波信号产生;如果发生与其他介质的接触时,那么对应的负载阻抗就会发生变化,使之和特征阻抗不相等,就会产生回波信号。
这里定义一个反射系数为 ρ ,它是反射信号与发射信号的幅度的比值,我们用它来用来表示负载阻抗和特性阻抗的关系。

其中:tZ 表示任意一点的阻抗,cZ 表示特性阻抗。因此,在各种情况时阻抗和反射系数的不同如下所示:1.当同轴电缆传输正常时,那么t cZ =Z
, ρ =0 ,发射脉冲会被吸收,没有回其中:tZ 表示任意一点的阻抗,cZ 表示特性阻抗。因此,在各种情况时阻抗和反射系数的不同如下所示:
1.当同轴电缆传输正常时,那么t cZ =Z , ρ =0 ,发射脉冲会被吸收,没有回
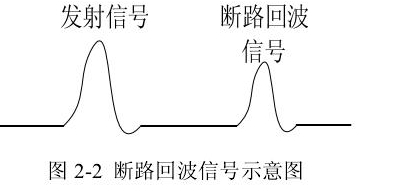
图 2-2 断路回波信号示意图
3.当同轴电缆传输短路(即为与其他介质接触时)时,那么tZ =0 , ρ = −1,同样产生全反射,但是短路回波信号和发射信号具有相反的极性,短路回波示意图如图 2-3 所示。
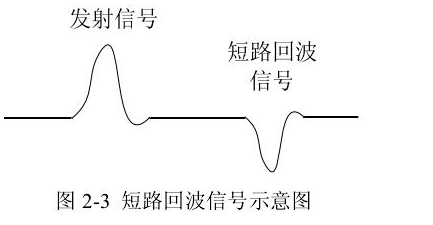
图 2-3 短路回波信号示意图
当脉冲信号在导波杆上传输时,如果碰上其他介质就会使该点的阻抗变化,从而反射系数也会发生变化,会产生回波信号。我们可以进一步计算发射脉冲和回波脉冲的时间差就能计算出发射电路到该介质接触点的距离。
导波雷达测量系统原理:
导波雷达液位计就是时域反射原理来进行测量的,测量过程我们分为信号传播和整个测量系统来作介绍。
导波雷达信号传播示意图如图2-4所示。
在机械机构上,仪表的表头内部的收发电路会通过同轴射频接插件和同轴电缆相连。同轴电缆的另一端将会在法兰的位置与同轴导波杆连接。导波杆则是直接插入到罐体的介质内,导波杆的末端与罐底底部则是有一段距离的。
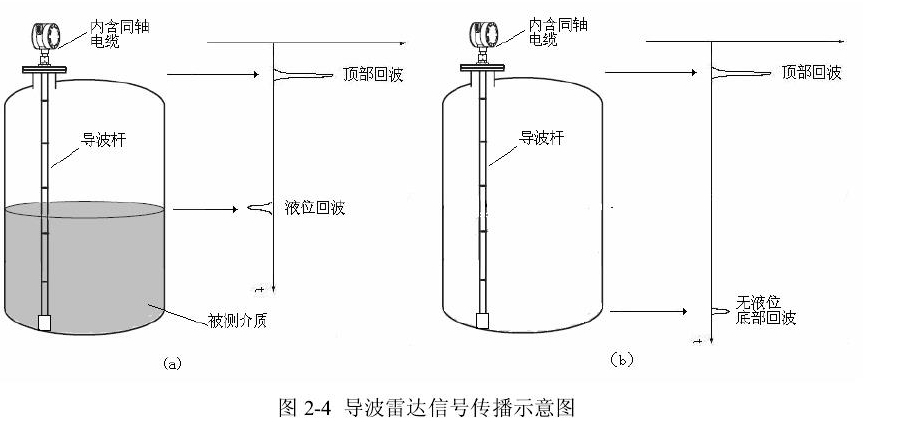
根据左图可以看到,电路板输出的脉冲信号会通过同轴电缆,再在同轴导波杆上进行传播。由2.1节的介绍,在同轴电缆和导波杆的连接处会首先发生断路,进而一部分信号会产生一个顶部回波信号,但是仍有一部分信号还会继续沿导波杆传播。当信号与被测液体表面接触时,其阻抗特性会发生变化,其一部分也会被反射,会再产生一个真正的液位回波信号。也会有另外一部分信号仍然会继续向下传播,终会损耗在不断发射中。液位计可以判断出液位回波和顶部回波之间的时间差,根据这个时间差,我们用单片机进行计算就可以得到液位的高度。
根据右图所示,在罐体为空的时候,没有液位就不会发生液位回波信号,但是仍然会有顶部回波信号,而且在导波杆的底部会断路而产生一个的底部回波信号‘。
假如罐体内有两种不同的介质,由于密度不同这两种介质会分别存在于液体的上部和下部。如果这两种介质的介电常数大不相同,那么就可以通过回波的不同来判断两种介质的分界面,进而也可以得出这两种介质的不同高度。由于脉冲信号是通过导波杆传播,导波杆上的空气、气态的凝结不会影响性能,因此可以长时间测量低介电常数的产品。一般情况下被测液体的介电常数越大回波信号也就越强,也就更容易检测出液位,比如水比丁烷更容易测量。
假设电磁信号在介质中传输无损耗,则信号在其中的传播速度可以表示为:
其中:c为电磁波在真空中的传播速度(3x10八立方米m/s)。
Y为介质的相对介电常数,
从为同轴电缆的相对磁导率(大多数液体其近似等于l}o
我们可以得到:
若电磁波在同轴导波杆上的传播距离为L,那么回波信号的传播时间为:根据这个实际传播速度结合时间就可以计算出液位[[19]。因此,的深度:
L可以表示为液位因罐体高度为H,后得到的液位高度为:
h=H一L导波雷达测量系统示意图如图2-5所示。
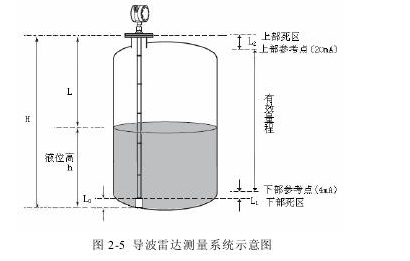
图中为整个导波雷达测量系统,导波雷达液位计发送的是窄脉冲信号,对刚性杆大测量范围为6.1 m,柔性杆为大范围则为30m。在实际测量中,在量程的上部和下部都会存在一段死区,分别为上部死区和下部死区,其长度分别为Lz和L,,这两个死区的特性是非线性的,所以造成测量误差会偏大。我们把上部死区的低点定义为上参考点,用它来代表液位的满点(高可测点)和20mA输出电流。下部死区的高点则定义为下参考点,用它来代表液位的零点(低可测。
点)和4mA输出电流。在导波杆末端到罐底的距离为L。
由此,在实际应用时,液位的计算需要考虑到上部死区和下部死区的因素。在液位显示时需要加上杆末端距离罐底的距离L。和下部死区的高度L1 [21] o
一般液位测量时只需要测量一定范围内的高度,即有效量程为两个死区之间的高度,也叫线性区。
在罐体内实际显示的液位高度(即以下参考点作为零点)为:
hD = h一L。一L, 这里L+L、是液位的整体迁移量。






