

- 面议
起订量:
Prescan 自动驾驶仿真软件
- 型号
- Prescan

该企业相似产品


北京津发科技股份有限公司是国级高新企、*认定的科技型中小企业和中关村高新企,具备自主进出口经营权;自主研发技术、产品与服务荣获多项省部级科学技术奖励、国家发明、国家软件著作权和省部级新技术新产品(服务)认证;通过了欧洲CE、美国FCC、欧盟RoHS、ISO9001、ISO14001、OHSAS18001等多项认证和防爆产品认证。
津发科技致力于推动人因工程与工效学行业发展和青年人才培养,2012年起在国内*发起“科研支持计划”,无偿支持人因工程领域青年学者进行科学研究;2014年*CSIP 与津发科技联合共建“*CSIP-津发人因工程技术创新中心”持续进行技术研发和基础及应用创新研究; 2016年起联合中国人类工效学学会发起“工效学研究工程”并设立“CES-Kingfar基金(工效学会-津发青年学者联合研究基金CES‐Kingfar Excellent Young Scholar Joint Research Funding)”借鉴国家自然科学基金的评审标准对青年学者研究计划书予以资助;2017年起联合*高等教育司设立“人因与工效学”产学合作协同育人项目,并由高教司发布申报指南和立项名单;2019年起联和工效学联合会(IEA)设立奖项The IEA/Kingfar HFE Research Award“发展中国家人因与工效学研究奖”,旨在表彰世界各地为解决发展中国家典型人因工程问题而取得的高质量人因工程与工效学研究成果的个人,以期改善发展中国家人民的福祉; 2020年起联合主办HFE AWARD全国人因与工效学创新大赛。
多年来在教育科研领域积极推动人因与工效学技术进步,携手众多研究者进行联合开发与科研实验、人才培养、学术合作与产学研融合,联合申报基金项目、科技项目等;承接和参与多项国家自然科学基金,国家重点研发计划、科技项目和标准编制;承接科研院所和高校实验室规划建设、并通过产学研方式与学术和科研机构建立合作关系,联合国家科研课题进行科技攻关,并联合开发适合中国国情的基于人工智能和虚拟现实技术的人-机-环境测试与工效学评价等多项科研成果,致力于将人因与工效学科学方法和成果应用到国防和社会科技发展进步。
津发科技将持续以推动人因工程发展为己任,在教育科研各领域推动人因与工效学技术进步,为中国教育科研事业的发展提供服务。
详细信息
一、Prescan自动驾驶仿真软件简介
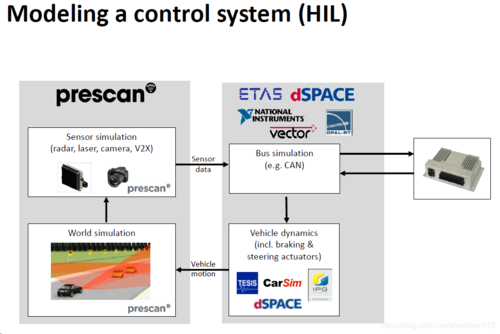
PreScan是德国Seimens西门子公司旗下汽车自动驾驶仿真软件产品,Prescan是以物理模型为基础,开发ADAS和智能汽车系统的自动驾驶仿真平台。支持摄像头、雷达、激光雷达、GPS,以及V2V/V2I车车通讯等多种应用功能的开发应用。 PreScan基于MATLAB仿真平台,主要用于(ADAS)汽车高级驾驶辅助系统和无人自动驾驶系统的仿真模拟软件,其包括多种基于雷达,摄像头,激光雷达,GPS,V2V和V2I车辆/车路通讯技术的智能驾驶应用。支持模型在环(MIL),实时软件在环(SiL),硬件在环(HiL)等多种使用模式。北京津发科技股份有限公司作为德国Siemens西门子公司正式签约合作伙伴,旨在进一步加深双方商业、技术合作,开辟新市场,为无人驾驶领域贡献积极力量。
二、软件概览
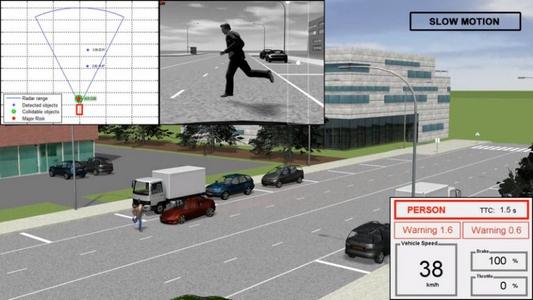
智能汽车自动驾驶仿真系统在PreScan中的仿真实现如下图所示。
| 在PreScan GUI 中搭建道路及外界基本场景,在PreScan Viewer显示3D视景 | 在建好的场景中添加车辆行人及相关传感器来获取目标信息 | 在Simulink中加载已建好工况中的各车辆行人及传感器的模块,利用传感器模块的输出信息进行相关控制算法设计 | 将控制指令发给执行器,执行器可以是prescan中自带的汽车模型,还可以是AMEsim、CarSim相关车辆动力学软件建立的数学模型。 |


| 智能驾驶仿真实现 | 特点 |
| 1. 场景工况 | 交通要素数据库 |
| 2. 传感器&通讯 | 19种传感器类型包括 Mono camera Stereo camera |
|
3. Matlab Simulink | 基于Matlab Simulink平台 |
| 4. 执行器&人机界面 | 车辆动力学模型 PreScan model |
三、详细功能
| 软件详细功能 | 特点描述 |
| 交通场景建模型 | ●Roads 道路模型 ●Database of road types 道路数据库 ●Environment 环境模型 ●Road users 道路使用者 ●Weather & Lights 天气光照 |
| 传感器模型 | ●Camera, fisheye, mono, stereo 摄像头、鱼眼、单目及双目摄像头 ●Radar 毫米波雷达 |
| ADAS algorithm implementation 控制算法仿真集成 | ●Model in the Loop 模型在环 通过MatLab/Simulink平台,可以引入各种编程工具开发的算法代码。 ●Hardware in the Loop 硬件在环 也可以直接引入ECU硬件,构成硬件在环试验台 |
| Driver model驾驶员模型 | ●根据理想路径以及车辆当前位置计算车辆转角信号输出。 ●根据理想速度以及车辆当前速度计算油门、刹车信号。不再遵循原先定义的路径。 ●Driver in the loop 驾驶员在环 |
| Vehicle actuation modelling 车辆执行器建模 | ●2D bicycle dynamics model 2D动力学模型 ●3D two track dynamics model 3D动力学模型 ●3rd party dynamics model import 外部车辆动力学模型导入 |
| Test Automation (TA) 自动化测试 | ●Select variables (GUI) 选择自动化测试参数 |
| Demos | ●PreScan标准安装包自带128 个demo场景,所有的场景模型以及系统控制算法*对用户 开放 ●PreScan标准安装包自带19个智能驾驶系统传感器 ●PreScan标准安装包自带30多个智能控制算法模型,所有系统控制算法*对用户开放、可编辑修改 ●PreScan标准安装包自带43个交通道路参与者及执行器,并支持导入用户自定义的第三方3D模型 ●PreScan标准安装包自带134个ADAS仿真系统模型,这些案例所含的场景模型、系统控制算法、执行器模型*对用户开放 |
| 功能插件 | ●大规模交通流自动生成器 ●IBEO扫描数据自动转换为PreScan仿真场景 ●摄像头物理模型 ●升级版车车通讯传感器模型 ●PreScan和PTV Vissim软件耦合计算 |
四、应用案例
1.MCity使用PreScan验证测试场设计

2.车道保持系统硬件在环(HIL)测试平台

3.自动驾驶系统硬件在环(HIL)测试平台

4.自适应巡航/自动紧急制动系统ViL测试平台

5.基于Nvidia PX的人工智能硬件在环测试平台


| 在PreScan GUI 中搭建道路及外界基本场景,在PreScan Viewer显示3D视景 | 在建好的场景中添加车辆行人及相关传感器来获取目标信息 | 在Simulink中加载已建好工况中的各车辆行人及传感器的模块,利用传感器模块的输出信息进行相关控制算法设计 | 将控制指令发给执行器,执行器可以是prescan中自带的汽车模型,还可以是AMEsim、CarSim相关车辆动力学软件建立的数学模型。 |





