1. 系统方案
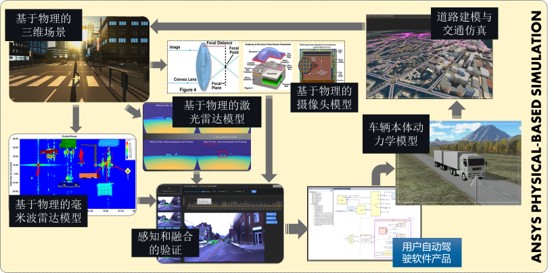
ANSYS高精度自动驾驶仿真验证平台提供了基于物理的三维场景建模、基于语义的道路事件建模、基于物理光学属性的摄像头和激光雷达的仿真、基于物理电磁学属性的毫米波雷达的仿真,从而实现多传感器、多交通对象、多场景、多环境的实时闭环仿真。其主要功能如下:
1) 开放式交通场景编辑模块,自定义设定道路和交通场景,可以自定义设定道路两旁的建筑物,绿化带等等;
2) 可以根据用户需求,自定义设定道路场景上的交通流,可以自定义设定道路上来往的车辆,行人和交通指示灯;
3) 可以根据客户需求,自行设定主动驾驶(或算法控制车辆)的车辆动力学参数;
4) 支持高精度的三维场景仿真和基于环境光的模拟;
5) 支持高精度的物理属性的传感器仿真,包括毫米波雷达的仿真、摄像头的仿真和激光雷达的仿真;
6) 此外,考虑到能更加逼真地反映“人—车—路”在环仿真测试,该平台还提供了开放的接口,可以与实物传感器、VR设备、控制器、各类测试数据进行无缝的联入,从而更好的满足不同级别、不同目标的测试仿真要求。
2. 系统构成
下面分别介绍本平台各模块的构成。
2.1.自定义道路环境
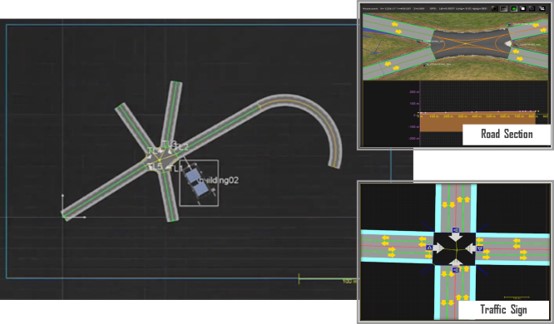
ANSYS自动驾驶仿真平台提供了一套自定义道路场景的设计工具,具备直道、弯道、曲线等设计能力,支持道路宽度、长度、半径、方向、车道数量、车道方向、车道限速、车道类型等的编辑。
同时,该设计工具支持高架等不同高度道路以及不同坡度倾角、道路交叉口、匝道、并道等的定义。还支持车道线的自定义化建模,包括单线、双线、实线、虚线、车道线纹理、颜色等一系列车道线类型。同时,软件集成丰富的环境模型库,如树木、建筑物、交通标识、路灯、电线杆、绿化带、动物,施工路段障碍物和设施、交通行人等对象模型,可根据用户需求对道路场景进行快速建模。
除了自定义场景外,ANSYS自动驾驶仿真平台还支持导入OpenStreetMap等3D高精地图,自动生成与地图匹配的道路模型。
2.2.自定义交通场景
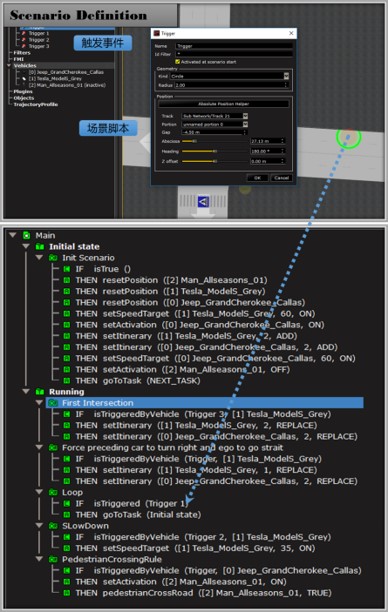
ANSYS自动驾驶仿真平台还提供了快捷的基于语义的道路交通流设计,包括车道行驶规则、车辆及行人行为、交通指示牌行为,以及某一时刻各交通对象交通行为的精确数据输出。此外,交通对象的行为也可以人为定义,包含如车辆驾驶行为、突然变道、突然加速、行人乱闯红灯和人行道等一系列场景的仿真,同时软件内部车辆和行人之间可自定义交互与否,即可仿真自动避让行人和忽视行人发生碰撞等行为。软件内嵌脚本语言定义,同时也支持如Python,C++等语言的接口控制来定义交通行为。如下图所示,为通过语义级的脚本语言来定义车辆和行人等交通对象的行为。
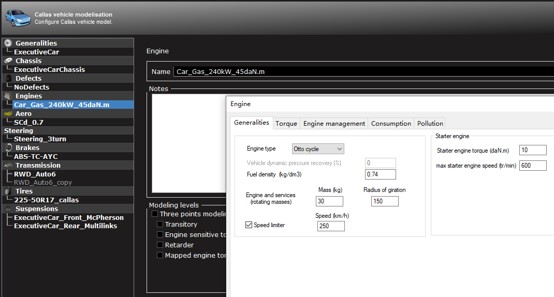
2.3.构建车辆动力学模型
除了上述的道路场景以及交通流的搭建能力之外,ANSYS自动驾驶仿真平台同样提供了基于总成特性的车辆动力学模型,并提供了以下性能参数的配置:
Ø 底盘参数,如长宽高、轴间距、重量等;
Ø 性能参数,如大时速、引擎转速等;
Ø 转向参数;
Ø 轮毂参数;
Ø ……
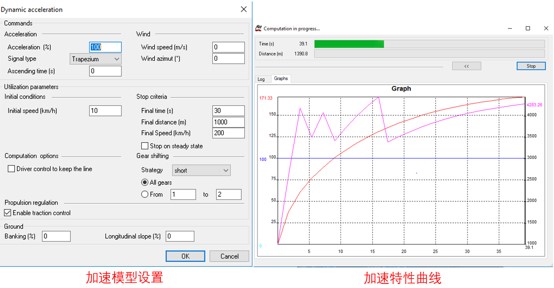
同时,软件还提供了各类特性参数的预定义实验数据,方便用户对所定义车辆的特性进行快速的测试验证。相关的实验数据有:
Ø 加速特性实验数据;
Ø 刹车特性实验数据;
Ø 转弯特性实验数据;
Ø 方向盘特性实验数据;
Ø 侧风实验数据;
Ø 障碍物和转弯实验数据;
Ø ……
ANSYS自动驾驶仿真平台还支持外部车辆动力学模型的导入和集成,如CarSim车辆动力学模型,以及用户自研的车辆动力学模型。
2.4.基于物理真实的三维场景建模
在无人车辆的物理仿真中,除了前述关于道路场景,交通流以及车辆动力学模型的建模能力外,ANSYS自动驾驶仿真平台的大特点和优势在于提供基于物理真实的三维场景建模和ray-tracing的图形算法。使得上述的场景的构建与物理真实达到一个高匹配度,以此对无人车中传感器的感知和后期控制算法的验证提供了很好的准确性和真实性,以减少场景搭建的缺陷所带来的传感器和感知算法的决策错误。
在整个基于物理真实的建模平台搭建中,ANSYS 自动驾驶仿真验证平台会通过对以下物理真实参数的定义和基于ray-tracing的图形算法来保证仿真的准确性和真实性:
n 环境光源的定义,包括:
Ø 天空的照度值;
Ø 基于经纬度的太阳光的照度和位置定义;
Ø 环境场景中各种点光源以及面光源的定义(光谱+IES+XMP);
Ø 车辆照明系统的光源定义(光谱+IES+XMP);
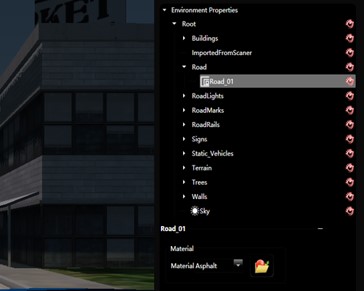
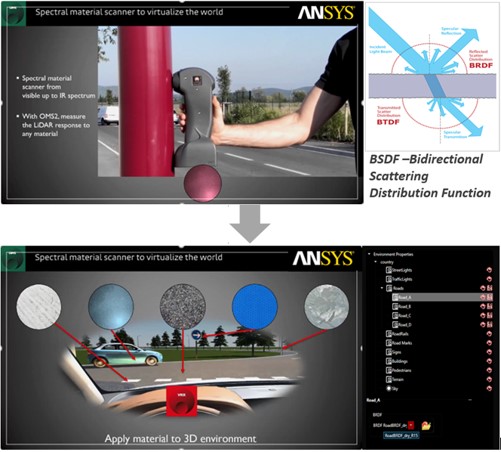
n 环境场景中包括道路,建筑,车身等一系列材料表面光学属性的定义。
其中各个光源的定义通过导入相关定义文件,如下图所示:
如前述所讲,材料表面光学属性通过ANSYS开发的一套OMS材料物理光学属性BRDF测量仪硬件设备,对用户所需仿真的场景材料库进行探测,并将探测所得材料表面光学属性BSDF函数附在前述场景建模的所属材质表面,从而在ray-tracing的图形算法下仿真得到一整套完整的考虑外部环境光以及物体表面光学属性的物理真实的三维场景建模。同时ANSYS自动驾驶仿真平台还提供丰富的材料库供客户场景建模使用。
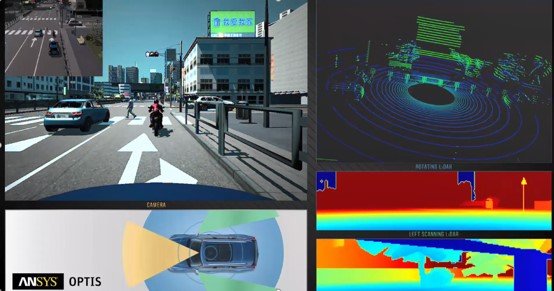
2.5.基于物理真实的多传感器模型融合和系统级仿真
在无人车辆中,除了前述ANSYS自动驾驶仿真平台能提供的基于物理真实的场景建模能力外,同样集成了包含摄像头,激光雷达和毫米波雷达的感知系统模型仿真。可以实现物理级的实时动态仿真,即在基于物理真实的道路场景以及交通流定义完成,添加环境光源以及材料表面光学属性后,通过搭建智能驾驶模拟器来实现感知系统的动态实时仿真验证,研究环境以及交通流对感知系统的影响。同时,ANSYS自动驾驶仿真平台还支持如C++/ANSYSSCADE/SIMULINK等外部接口的控制算法来对传感器的输出进行数据处理和验证,包括SIL, HIL等多级别仿真验证。
1)基于物理的摄像头系统级仿真
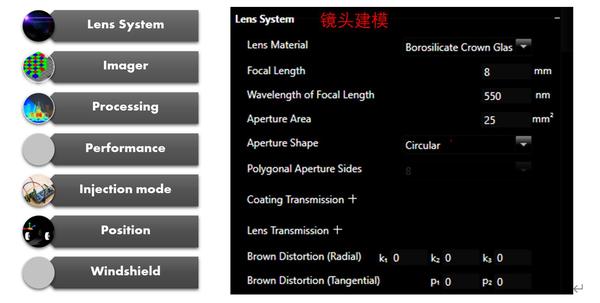
在基于物理的摄像头系统级仿真阶段,ANSYS自动驾驶仿真平台通过定义摄像头的如下物理参数得到RAW图像用以对摄像头供应商进行验证或者硬件在环系统的仿真验证。摄像头系统级仿真参数模型参照EMVA1288标准建模,主要包含:
n 镜头模型
² 镜头材料;
² 焦距;
² 孔径光阑;
² 镜片透过率函数;
² 畸变等;
n 成像仪模型
² 分辨率;
² 尺寸;
² 曝光时间;
² 噪声系数;
² 量子效率;
² 增益等;
n 处理器模型
n 摄像头位置
n 风挡参数
² 入射角;
² 折射率;
² 厚度;
² 透过率函数等。
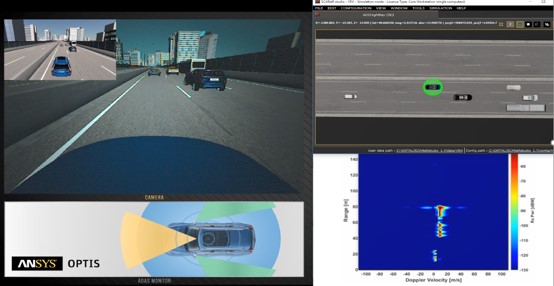
基于以上物理参数的建模以及对场景环境光源的考虑和材料表面光学属性的影响,在系统级仿真中摄像头输出与真实匹配度高度一致的RAW图像。如下图所示ANSYS自动驾驶仿真平台的摄像头实时输出提供给感知算法的车道线识别。
2)基于物理的激光雷达系统级仿真
类似于摄像头的系统级仿真,激光雷达的系统级仿真通过准确定义的激光雷达参数,通过发射和接收生成的点云图对用户构建的场景和交通流进行感知探测并验证相关感知算法。支持多种激光雷达模式(扫描式,旋转式)。
激光雷达的建模参数包括:
n 扫描式
² 大和小探测距离;
² 横向视场角;
² 纵向视场角;
² 分辨率等;
n 旋转式
² 大和小探测距离;
² 旋转速率;
² 大线数等;
如下图所示为ANSYS自动驾驶仿真平台的激光雷达实时探测深度图与摄像头输出RAW图像相匹配。
3)基于物理的毫米波雷达系统级仿真
毫米波雷达的系统级别仿真通过ANSYS*的ROM降阶技术,以HFSS软件为模拟工具,可以通过内嵌接口工具与ANSYS自动驾驶仿真平台结合实现毫米波雷达与摄像头和激光雷达的同步实时仿真,得到雷达回波的成像结果并进行分析。
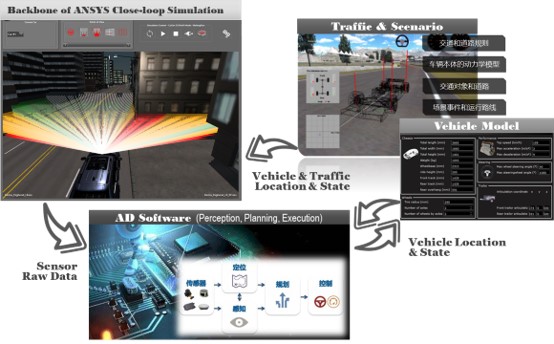
2.6.实时闭环仿真系统
如前述通过对环境、场景、交通流的建模构造出无人车辆的运行场景和轨迹,同时耦合如摄像头、激光雷达和毫米波雷达的感知系统的仿真,通过开放的API接口,可以方便的进行外部自动驾驶算法的集成。从而形成实时闭环的驾驶系统仿真。
2.7.基于物理的智能头灯照明仿真系统
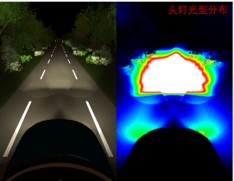
随着智能驾驶辅助系统(ADAS)的逐渐普及和行业发展,车辆智能化头灯照明系统也逐渐成为当前行业的发展趋势和应用热点。ANSYS自动驾驶仿真平台Headlamp模块通过ANSYS*的物理级仿真引擎,为客户提供真实的车辆头灯路面光型分布测试和动态驾驶与智能头灯仿真测试。
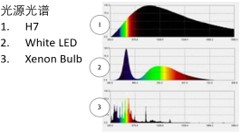
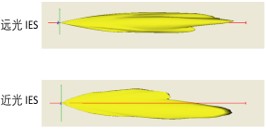
除了前述在三维环境建模中通过ANSYS OMS设备进行材料表面光学属性的采集与赋值外,为了保证接近真实的物理仿真光型,Headlamp模块同样对光源进行仿真模拟,包括车灯光源,自然光光源,路灯光源等。定义方式包含如:
Ø 光源光强分布IES文件;
Ø 光源光谱spectrum文件;
Ø 光源强度等;
如下图所示分别为不同光源的光谱分布和车灯光源的IES定义文件。
基于环境和光源的物理仿真,可以实现车辆前照灯远光,近光,侧灯的切换以及光强的实时切换控制,同时丰富的光度学分析工具,包含色度学,光度学,等照度线,等照度区域等信息便于分析光分布情况。支持的25米目标墙光分布信息用于分析验证头灯光分布是否符合标准。
除了静态光型分布验证,ANSYS Headlamp开放的如C++,SCADE,Simulink的光型数据接口支持客户自定义化的智能头灯开发与验证,同时丰富的动态驾驶模拟和场景仿真也可以帮助客户实现实时的动态驾驶头灯验证,如AFS,ADB,矩阵头灯,像素头灯等智慧头灯的仿真与测试验证,基于IIHS动态头灯测试标准的夜间测试验证。
ANSYS VRXPERIENCE 驾驶仿真软件由SCANeR™提供技术支持
要满足自动驾驶车辆的严格安全标准,需要测试数百万种情境下的世界、交通和天气的所有复杂交互。物理测试需要数十亿英里的真实环境驾驶,这需要数十年开发时间和巨额成本。
ANSYS VRXPERIENCE 驾驶仿真软件由经 AVSimulation验证的 SCANeRTM 提供技术支持。这是一款开放式的可扩展模块化仿真解决方案,用于构建真实度*的虚拟环境。ANSYS VRXPERIENCE 驾始仿真软件由 SCANeR 提供技术支持,可根据各种目标和性能要求进行测试。它集成了高清 (HD) 地图生成的道路状况与资料库、交通状况、天气情况及车辆动力学等内容。
任何自定义车辆模型都可以通过 FMI、C/C++、ANSYS Twin Builder 或 Simulink 进行连接。
SCANeR 支持的 VRXPERIENCE 驾驶仿真软件还集成了所有驾驶员硬件模拟器界面,帮助打造出具有真实感的驾驶体验。
SCANeR是一个全面的交通场景仿真软件套件,专门用于汽车和运输仿真,解决ADAS,自动驾驶车辆,HMI和前灯使用案例的测试和驾驶问题。
SCANeR提供构建超逼真虚拟世界所需的所有工具和模型:道路环境,车辆动力学,交通,传感器,真实或虚拟驾驶员(自动驾驶),车前灯,天气状况和场景脚本。
它不是一个“黑匣子”工具,而是一个真正的科研实验的模块化仿真平台,灵活,可扩展和开放,满足研究人员和工程师的需求。它的多功能性使得整个设置成为可能:驱动模拟器Simulator,模型在环MIL,软件在环SIL,硬件在环HIL。
ANSYS VRX平台是一个全面的交通场景仿真软件套件,专门用于汽车和运输仿真,解决ADAS,自动驾驶车辆,HMI和前灯使用案例的测试和驾驶问题。
ANSYS VRX平台提供构建超逼真虚拟世界所需的所有工具和模型:道路环境,车辆动力学,交通,传感器,真实或虚拟驾驶员(自动驾驶),车前灯,天气状况和场景脚本。
它不是一个“黑匣子”工具,而是一个真正的科研实验的模块化仿真平台,灵活,可扩展和开放,满足研究人员和工程师的需求。它的多功能性使得整个设置成为可能:驱动模拟器Simulator,模型在环MIL,软件在环SIL,硬件在环HIL。
欧洲2.0旨在满足场景密度要求,同时通过利用SCANeR™的新磁贴系统管理,可以创建有效的场景控制。由于其大尺寸和地形多样性,欧洲2.0提供了许多机会。使用欧洲2.0,您将能够使用各种实验(ADAS的开发,管理事件的研究等),以便在许多移动车辆上快速和长时间驾驶:公路,高速公路,山脉(雪,曲线和银行) ,城市,休息区等
由于SCANeR™即将推出的新“化”功能,客户可以自动将标志和道路标记更改为其他国家/地区(DE / US / MX)。
使用SCANeR™studio的Terrain模式可以轻松导入GIS数据。
图片来源:avsimulation网站
据外媒报道,ansys宣布与avsimulation合作,将avsimulation的仿真技术与ansys的沉浸式自动驾驶仿真解决方案相结合,加快自动驾驶汽车进入市场的步伐。
为了达到严格的自动驾驶安全标准,需要在数百万种场景中,测试自动驾驶汽车与周围环境、交通和天气之间的复杂互动。该测试需要对原型车进行数十亿英里详尽的物理道路测试,花费数十年的开发时间和成本。
ansysvrxperience有助于减少物理原型测试,节省时间。它是ansys的沉浸式解决方案之一,结合了虚拟现实功能与物理仿真。使工程师能在日常驾驶条件下,测试、验证以及体验自动驾驶系统和车辆性能,一天之内就能完成数百万英里虚拟测试。vrxperience包括hmi测试、物理传感器仿真(包括雷达、激光雷达、摄像头和超声波)、嵌入式软件控制集成以及前照灯仿真,并与仿真数据管理和系统安全分析连接。
avsimulationscaner studio嵌入vrxperience,作为其驾驶模拟器模。avsimulationscanerstudio是一个开放的、可扩展的模块化仿真解决方案。它能创建真实的虚拟世界,使用户在高性能集群或者公共云中,例如微软azure,模拟成千上万种多变的驾驶场景。scaner?融合了高清地图和资产库生成的道路、交通状况、天气条件、以及汽车动力学等。
雷诺集成cae & plm工程副总裁olivier colmard表示,“虚拟样机和大规模仿真是确保自动驾驶汽车安全的关键。雷诺车队利用avsimulation及其scaner studio技术,可以在百万种驾驶场景中设计、模拟和测试自动驾驶系统,验证汽车安全性。此次合作有助于以减少物理测试,缩短上市时间,确保安全。”
ansys系统事业部副总裁兼总经理eric bantegnie表示,“vrxperience与scaner驾驶模拟器结合,将使原始设备制造商、一级和第二级客户能够快速追踪三级到五级自动驾驶汽车的创建、集成和认证。此次合作有助于汽车制造商降低开发成本,加快自动驾驶汽车交付进度。”
AVSimulation与ANSYS之间的战略合作伙伴关系通过虚拟测试加速了自动驾驶汽车的设计和验证,可在一周内实现数百万英里的数字道路测试。
此次合作将AVSimulation的革命性仿真技术与ANSYS的沉浸式自动驾驶模拟解决方案相结合,大大加速了自动驾驶汽车向汽车制造商推向市场的道路。
作为其驾驶模拟器模块嵌入在VRXPERIENCE中,AVSimulation经过验证的SCANeR™Studio产品是一个开放且可扩展的模块化仿真解决方案,可创建超逼真的虚拟世界,使用户能够模拟数千种高性能集群或多种可变性的驾驶场景。公共云,例如Microsoft Azure。SCANeR™融合了高清地图和资产图书馆生成的道路,交通状况,天气状况,车辆动力学等。
“通过这种合作伙伴关系,AVSimulation和ANSYS提供了惊人的广度和深度的技术,使汽车制造商能够大幅降低开发成本,加快向客户交付自动车辆”,ANSYS系统业务部副总裁兼总经理Eric Bantegnie说。