


津发科技 品牌
生产厂家厂商性质
北京市所在地
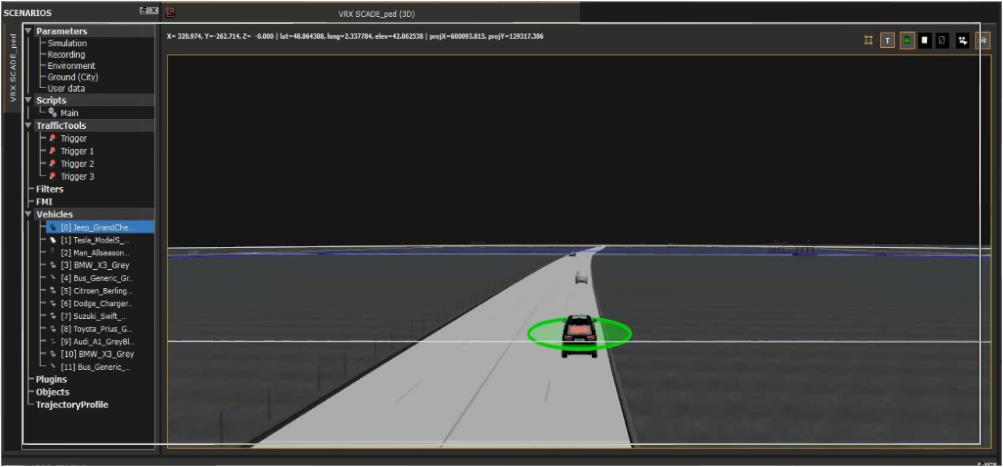
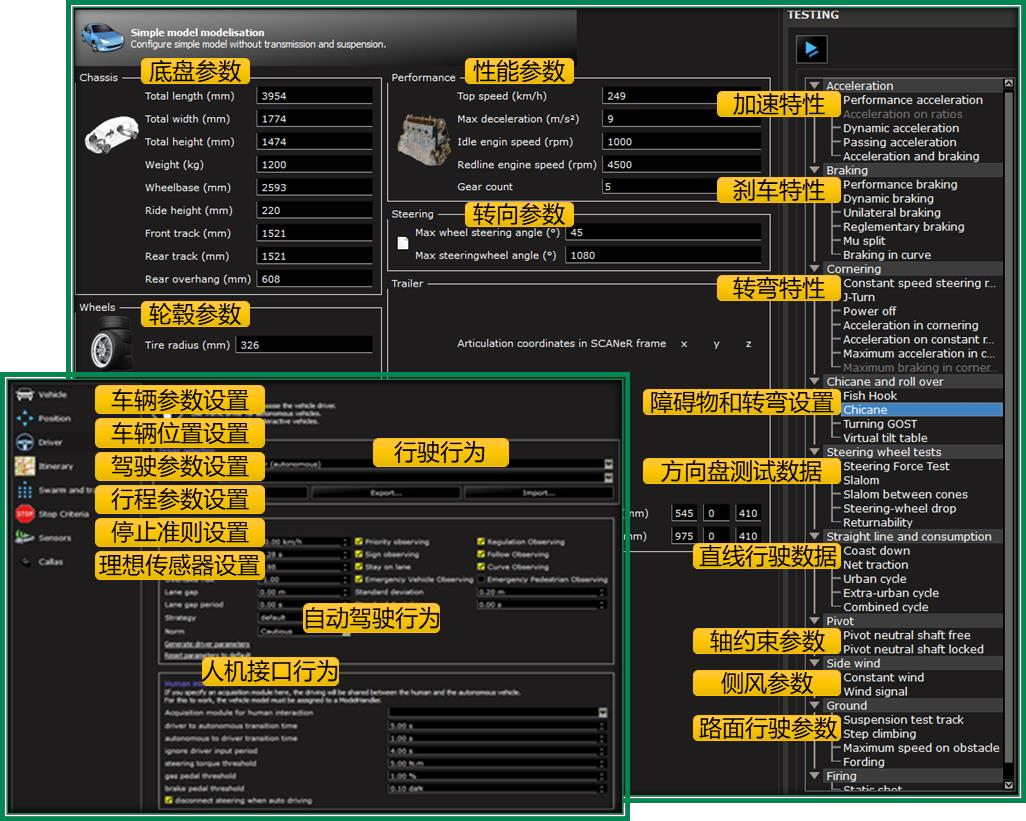
ErgoSIM驾驶模拟仿真软件是一个全面、开放和可扩展的平台,适用于交通驾驶与智能座舱领域研究,研究人员可根据具体研究需求,通过系统搭建适合的驾驶仿真场景并进行相应测试。系统通过模型在环(MiL)的仿真方式,采用软件在环(SiL)与硬件在环(HiL)的测试方法,使得用户可以使用驾驶模拟系统在驾驶模拟仿真环境中行驶。
此外,系统能够结合ErgoLAB人车路环境同步云平台,将搭建的模拟环境数据结合驾驶模拟器数据、主客观多模态人因数据,综合地进行分析,可用于对智能座舱系统设计、自动驾驶系统功能、驾驶员行为等进行测评。






ErgoLAB人机环境同步云平台可人-机-环境多维度数据的同步采集与综合分析,包括眼动追踪、生理测量、生物力学、脑电、脑成像、行为、人机交互、动作姿态、面部表情、主观评 价、时空行为、模拟器、物理环境等,为科学研究及应用提供完整的数据指标。平台可完成完整的实验和测评流程,包括项目管理-试验设计-同步采集-信号处理-数据分析-人工智能应用-可视化报告,支持基于云架构技术的团体测试和大数据云管理。




















