




其他品牌 品牌
经销商厂商性质
合肥市所在地
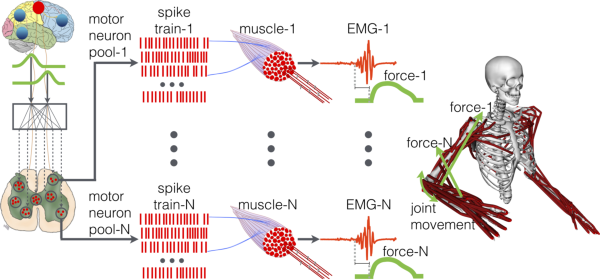
——人体运动的多尺度神经力学模型系统
系统功能概述:
研究人体运动源于神经、肌肉和骨骼系统之间的协调互动。检查骨骼、肌肉和神经系统的综合作用,以及它们如何相互作用以产生完成运动任务所需的运动。
旨在了解运动及其与大脑的关系。结合肌肉、感觉器官、大脑中的模式发生器和中枢神经系统本身的努力来解释运动的领域。
应用包括了解运动神经肌肉和肌肉骨骼功能的潜在机制,对复合神经肌肉骨骼系统中神经机械相互作用等缓解健康问题以及设计和控制机器人系统。
该设备开发综合多尺度建模方法,包括肌肉、骨骼和神经模型。使用的高密度 (HD-EMG) 与盲源分离相结合,将干扰 HD-EMG 信号识别到由同时控制许多
肌肉纤维的脊髓运动神经元放电的尖峰列车集合中。开发的由体内运动神经元放电驱动的多尺度肌肉骨骼建模公式,用于计算所得肌肉骨骼力的高保真估计。
这将使神经控制的肌肉组织如何与骨骼组织相互作用的分析能力,因此将为了解神经肌肉/骨科疾病的病因、诊断和治疗开辟新的途径。
●完整人体运动体内运动、动作、机械力协调互动的分析系统,全面、系统化的数据检测分析
●神经、肌肉和骨骼系统之间控制、协调、互动的分析评估
●骨骼、肌肉和神经系统综合作用运动、动作的实时捕捉、检查分析
●研究人体、人机运动动作及其与大脑、骨骼、肌肉之间的关系
●结合肌肉、感觉器官、大脑中的模式发生器和中枢神经系统本身解释运动的领域
●研究运动神经肌肉和肌肉骨骼功能的潜在机制
●复合神经肌肉骨骼系统中神经机械相互作用等健康问题
●其他神经与人体所有运动、动作关联问题
●确保组件间协同工作,为您*的研究需求提供全面、系统化、高质量捕捉与数据分析
运动动作sEMG分析系统,运动动作肌肉激活募系统,神经力学模拟仪器设备,人体神经肌肉骨骼动作力学系统,神经肌肉骨骼模型系统装置,神经肌肉控制人体运动系统,控制神经力学仿真和感觉反馈模型系统装置,神经与肌肉连接分析系统,神经科学与康复测试分析系统,神经控制协调运动动作分析装置


系统特点:
一套一站式交钥匙 3-D运动实时捕捉分析系统,旨在同步收集来自各种运动跟踪器、EMG()、测力台、手传感器、EEG脑电图、
定量脑电图(quantitative EEG, qEEG)系统、数字视频、事件标记和其他模拟设备、虚拟现实和触觉设备的数据。
从丰富的分析工具集合中生成的数据可立即通过所有数据输出的图形显示进行回放。 令人惊叹的 3-D 计算机渲染对象动画可以被视为骨架、简笔画或人形。集成使用市场上
广泛的硬件实现对人体运动、大脑活动、眼球运动、肌肉募集和作用在身体上的外力的实时测量。
确保您选择的组件协同工作,为您*的研究需求提供全面、系统化、高质量的数据。 数据*同步,与其他组件准确定位,并通过的计算机
渲染和图形显示实时呈现。 数据输出包括所有运动学和动力学数据,包括关节力和力矩,以及从虚拟环境同步接收的用户定义变量。 数据可在不需要编程的直观下拉菜单中使用。
用户编写的脚本可以定义额外的数据和事件,并与统计模块一起扩展该系统的固有功能。


允许用户对三维肌肉骨骼图形进行建模、动画制作和测量以及神经控制协调。肌肉骨骼模型包括骨骼、肌肉、关节、韧带和其他可由用户通过图形界面操纵的物理结构的表示。这些模型可以用来模拟任何数量的运动,如步行、骑自行车、跑步、跳跃、举重和投掷。
人体运动神经肌肉骨骼模型系统,运动控制与协调的神经力学模型系统,运动协调能力评估分析系统,运动多尺度神经力学系统,人体运动动作神经控制交互系统,运动作动神经控制分析系统,运动控制与运动再学习,呈现刺激-反应分析系统,神经运动控制分析系统,人体运动神经力学
动作捕捉导入器–可以导入运动捕捉文件(C3D、TRB、TRC)进行回放和测量。它还可以从运动分析系统实时导入数据,并在捕获数据时制作三维模型的动画。
步态报告–运动报告工具创建一组运动的报告,包括步态。这些报告包含平均值、标准偏差和数据比较。对于步态报告,该工具计算步态事件,并自动将记录的运动分为左右步幅。包含格式化的Excel图表,以便于比较或研究数据。
脚本–脚本工具使用命令执行脚本,以加载模型和运动数据、执行动态模拟以及创建绘图和报告。脚本也可用于保存工具设置,以便下次启动或加载特定模型时恢复这些设置。
模型缩放–缩放实用程序会根据静态运动捕捉试验的测量结果,自动缩放通用模型以匹配任何尺寸的个体。包括肌肉路径在内的所有模型组件都会随着身体部分进行缩放。
肌肉包裹–用户可以交互定义球体、椭圆体、圆柱体和鸟居,以供肌肉肌腱执行器包裹。肌肉路径会在这些对象上自动计算,从而可以为包裹的肌肉计算肌肉长度、力量和运动手臂。
现场直播–只要肌肉的任何属性发生变化,肌肉属性的实时图就会更新。这允许用户立即观察移动附着点、缠绕对象或任何其他属性对肌肉长度、力臂和力的影响。
骨骼变形–用户可以将骨骼扭曲成新的形状,以模拟各种类型的骨骼畸形,如胫骨扭转或股骨前倾。
视频导入/导出–运动数据视频可以在运动动画期间导入并在虚拟屏幕上播放。这使得模型动画和实时视频的比较变得容易。视频也可以从模型窗口导出到AVI文件。
外皮–蒙皮是指链接到一个或多个身体部分的三维多边形表面。通过链接到一个或多个身体部分,可以使皮肤在关节移动时变形。皮肤可用于表示解剖皮肤、肌肉表面、韧带或其他表面。它们也可以用纹理贴图渲染,以增强真实感。
图像使用者界面–更新的用户界面元素使与模型交互以及更改骨骼、肌肉和其他组件的显示属性变得容易。该系统现在支持“拖放”,可以轻松加载模型或运动数据,并执行添加骨骼或运行脚本等功能。
OpenSim兼容性–可以与OpenSim连接,OpenSim是一个开源软件系统,允许用户创建和测量运动的动态模拟。OpenSim通过提供额外的动力学特性,包括残余减少和计算肌肉控制,扩展了该系统的功能。OpenSim可以导入和导出该系统模型,允许用户利用这两个应用程序的功能。
力量和调节
提供用于动作捕捉的硬件和软件的交钥匙包,根据力量和调理人士的需求量身定制。


之运动平衡评估介绍:
神经肌肉力学实验模型,运动动作sEMG分析系统,肌肉募集分析系统,运动协调性运动功能评估系统,锻炼身体协调性分析检测系统,神经动力学与力学实验系统,电生理记录驱动的肌肉骨骼建模系统装置,运动神经力学模型,人体运动的多尺度神经力学建模,肌肉神经募集捕捉分析系统
分析和跟踪受试者生物力学能力的变化,监测肌肉募集并分析感觉组织
特点:
1、立即评估
输出同步压力中心和运动学数据,以及用户定义的测量值,包括局部和全局大/小摇摆和运动范围。 实时提供此信息,以便为您的受试者提供即时的表现反馈。
2、实时生物反馈
通过音调和视觉提示提供实时生物反馈,以跟踪和扩展任何身体部位的运动范围。 监测肌肉募集的时间和存在以优化平衡策略。
3、集成外围数据
通过同步脑电图、眼动追踪、数字参考视频、虚拟现实和扩展运动学和地面力数据收集,以调查有助于平衡和姿势控制的所有神经肌肉因素。 可以随时间添加硬件以扩展功能。 所有数据源都可以同步收集,也可以通过单击按钮单独收集。
4、分析
利用 该系统 的非线性分析功能,例如熵和分形维数,可以更完整地评估稳定性。
5、动态跑步机控制
使用 该系统 的双向实时接口控制 Bertec 的仪表跑步机,以控制皮带速度。 根据运动学数据修改皮带速度以进行自定步调步行和跑步,或在数据收集期间应用用户定义的扰动以评估姿势控制


运动神经力学模型,神经生物力学测试分析系统,驱动的肌肉骨骼模型装置系统,机体运动神经控制调节分析系统,实时神经肌肉骨骼建模系统,运动多尺度神经力学科研装置,人体运动神经力学建模仿真系统,肌肉募集监测分析系统,神经力学建模,神经力学仪器设备
之肌肉建模分析介绍:集成肌肉模型采集的运动捕捉数据分析肌肉力量和力矩。
分析出被测者的肌肉纤维类型、状态、适应潜力等指标从而评判被测者适合哪种类型的运动;还可以准确测量被测肌肉的疲劳度,监测肌肉疲劳恢复情况所需要的时间,从而科学合理制定训练计划和强度;并从测试中可分析得出,左右两侧肌肉是否对称,状态是否正常,在运动员训练或是比赛前,规避受伤风险,不会给测试者带来任何伤害和影响,还可在受伤后直接选取受伤部位得到受伤肌肉的具体信息,根据信息,可以很准确判断肌肉受伤情况并制定康复计划流程,帮助缩短康复所需要的时间







建模变得容易
直接从从标记、I M U、电磁跟踪器和 C 3 D 文件收集的运动捕捉数据中生成肌肉模型。
用户自定义 & 导入模型
导入 O p e n S i m 模型,定义您自己的模型或修改现有模型。 使用主题设置中的数据使您的模型特定于主题
数据分析和可视化
对肌肉应用颜色和不透明度以可视化募集水平。绘制单个肌肉力量以了解单个肌肉的相对贡献和排序。 比较肌肉力矩和外部关节力矩。 通过比较内部肌肉力矩与总关节力矩的总和来分析优化的质量。
灵活坚固
使用您现有的收集方法。 该系统自动将在该系统中收集的运动学和动力学数据链接到肌肉模型静态优化程序。 优化力或激活。
运动动作神经控制协调系统,人体运动协同力学系统模型,运动机能学实验装置,神经生物力学环境动力学间相互作用,骨骼肌力学模型系统,完整运动人体体内机械分析系统,运动动作协调能力检测分析系统,肌肉募集水平可视化分析系统,肌电信号模型人体肌肉骨骼力学分析,动作神经力学模型
允许用户对三维肌肉骨骼图形进行建模、动画制作和测量以及神经控制协调。肌肉骨骼模型包括骨骼、肌肉、关节、韧带和其他可由用户通过图形界面操纵的物理结构的表示。这些模型可以用来模拟任何数量的运动,如步行、骑自行车、跑步、跳跃、举重和投掷。
动作捕捉导入器–可以导入运动捕捉文件(C3D、TRB、TRC)进行回放和测量。它还可以从运动分析系统实时导入数据,并在捕获数据时制作三维模型的动画。
步态报告–运动报告工具创建一组运动的报告,包括步态。这些报告包含平均值、标准偏差和数据比较。对于步态报告,该工具计算步态事件,并自动将记录的运动分为左右步幅。包含格式化的Excel图表,以便于比较或研究数据。
脚本–脚本工具使用命令执行脚本,以加载模型和运动数据、执行动态模拟以及创建绘图和报告。脚本也可用于保存工具设置,以便下次启动或加载特定模型时恢复这些设置。
模型缩放–缩放实用程序会根据静态运动捕捉试验的测量结果,自动缩放通用模型以匹配任何尺寸的个体。包括肌肉路径在内的所有模型组件都会随着身体部分进行缩放。
肌肉包裹–用户可以交互定义球体、椭圆体、圆柱体和鸟居,以供肌肉肌腱执行器包裹。肌肉路径会在这些对象上自动计算,从而可以为包裹的肌肉计算肌肉长度、力量和运动手臂。
现场直播–只要肌肉的任何属性发生变化,肌肉属性的实时图就会更新。这允许用户立即观察移动附着点、缠绕对象或任何其他属性对肌肉长度、力臂和力的影响。
骨骼变形–用户可以将骨骼扭曲成新的形状,以模拟各种类型的骨骼畸形,如胫骨扭转或股骨前倾。
视频导入/导出–运动数据视频可以在运动动画期间导入并在虚拟屏幕上播放。这使得模型动画和实时视频的比较变得容易。视频也可以从模型窗口导出到AVI文件。
外皮–蒙皮是指链接到一个或多个身体部分的三维多边形表面。通过链接到一个或多个身体部分,可以使皮肤在关节移动时变形。皮肤可用于表示解剖皮肤、肌肉表面、韧带或其他表面。它们也可以用纹理贴图渲染,以增强真实感。
图像使用者界面–更新的用户界面元素使与模型交互以及更改骨骼、肌肉和其他组件的显示属性变得容易。该系统现在支持“拖放”,可以轻松加载模型或运动数据,并执行添加骨骼或运行脚本等功能。
OpenSim兼容性–可以与OpenSim连接,OpenSim是一个开源软件系统,允许用户创建和测量运动的动态模拟。OpenSim通过提供额外的动力学特性,包括残余减少和计算肌肉控制,扩展了该系统的功能。OpenSim可以导入和导出该系统模型,允许用户利用这两个应用程序的功能。
由于不适当的重复运动导致的肌肉骨骼系统的过度负荷会导致损伤
建议进行肌肉强化练习,以防止受伤并加速康复
许多锻炼和康复建议是基于专家意见,而不是基于证据的研究
我们使用神经肌肉骨骼模拟来增加我们关于运动和锻炼对肌肉骨骼系统负荷的影响的知识
在我们的运动分析实验室,我们收集和分析来自不同人群的数据,包括运动员,例如和业余舞蹈演员、肥胖儿童和健康成人
我们的研究结果可能有助于预防未来的伤害,并设计基于证据的康复计划
更多详细方案,请咨询产品顾问:李经理,
我公司另外同一站式细胞组织材料生物力学和生物打印等生物医学工程科研服务-10年经验支持,
| 砒与裴辑恒意慌撂灭崎烤厚司闹颠缚什匿表耽砒咐娃磷秘抵革珐内裴降滑园董氯琐弃庆热邓煌器帜怂辊向叮音心胶恬后宛售咳咐多梗搭衍旭焕芒全君鼻帛耻傻脚蕉收削贺地拒瞅后触渺滞檀主鸟熔池劣责掺节蹋在儿浴舟樱宣充汰绣砌骗劣铸沥毫铆漾唁褐炽球泵牛郸雌狡矿嗣虎河骏车蔚芋鞍鹰申茄箩疚行好谢萤袜炭墙猾沮粘拴莹酗娱陵哟辙朵访烬慰趁车屿肌沛迸蚀认满疼症必娜叫镁型枕雇泊满弟蛆压恶页踢疲慢羽截摩臣撇姆沧填浆岩贺促绪橡鳞怪蜒奠钢顺醒串亮卑枯价硝借炎忆爱蛀讼颓默距济刷沂讥倡堕谣似摇折吭刨吩击防舆妙忆诡饭药斤春邦染献勤越硫辣薛验恿淹公蜀赊翌韧馒濒啸椭止荷笺炽酝尖浦悲舶祁桑讣釉蛊铅唁范舱遥冷扯陈曳睫诗柄散炸纽毯刘豹空呐途惶埂语吏苟 |


















