




其他品牌 品牌
经销商厂商性质
合肥市所在地
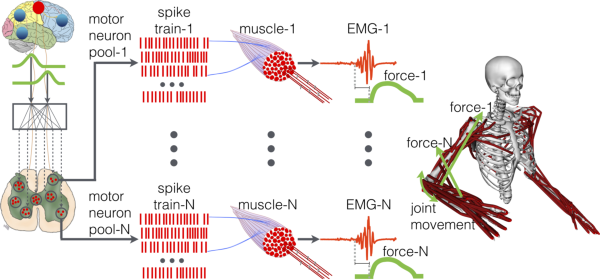
——人体运动的多尺度神经力学模型系统
系统功能概述:
研究人体运动源于神经、肌肉和骨骼系统之间的协调互动。检查骨骼、肌肉和神经系统的综合作用,以及它们如何相互作用以产生完成运动任务所需的运动。
旨在了解运动及其与大脑的关系。结合肌肉、感觉器官、大脑中的模式发生器和中枢神经系统本身的努力来解释运动的领域。
应用包括了解运动神经肌肉和肌肉骨骼功能的潜在机制,对复合神经肌肉骨骼系统中神经机械相互作用等缓解健康问题以及设计和控制机器人系统。
该设备开发综合多尺度建模方法,包括肌肉、骨骼和神经模型。使用的高密度 (HD-EMG) 与盲源分离相结合,将干扰 HD-EMG 信号识别到由同时控制许多
肌肉纤维的脊髓运动神经元放电的尖峰列车集合中。开发的由体内运动神经元放电驱动的多尺度肌肉骨骼建模公式,用于计算所得肌肉骨骼力的高保真估计。
这将使神经控制的肌肉组织如何与骨骼组织相互作用的分析能力,因此将为了解神经肌肉/骨科疾病的病因、诊断和治疗开辟新的途径。
●完整人体运动体内运动、动作、机械力协调互动的分析系统,全面、系统化的数据检测分析
●神经、肌肉和骨骼系统之间控制、协调、互动的分析评估
●骨骼、肌肉和神经系统综合作用运动、动作的实时捕捉、检查分析
●研究人体、人机运动动作及其与大脑、骨骼、肌肉之间的关系
●结合肌肉、感觉器官、大脑中的模式发生器和中枢神经系统本身解释运动的领域
●研究运动神经肌肉和肌肉骨骼功能的潜在机制
●复合神经肌肉骨骼系统中神经机械相互作用等健康问题
●其他神经与人体所有运动、动作关联问题
●确保组件间协同工作,为您*的研究需求提供全面、系统化、高质量捕捉与数据分析
电生理记录驱动的肌肉骨骼建模系统装置,人体运动神经力学装置,人体运动作动神经控制分析系统,肌肉激活募系统,神经力学科研实验系统,驱动的肌肉骨骼建模,平衡性身体协调性分析系统,实时神经肌肉骨骼建模装置系统,步态EMGEEG整合系统,神经力学实验装置






肌肉募集监测分析系统,跨时空尺度神经肌肉骨骼模型系统装置,人机交互神经肌肉骨骼模型,躯体运动神经控制分析系统,神经肌肉实验系统,生物力学运动监测分析系统,3D动作控制分析系统,神经控制协调运动动作,神经力学实验设备,神经肌肉募集系统



建模变得容易
直接从从标记、I M U、电磁跟踪器和 C 3 D 文件收集的运动捕捉数据中生成肌肉模型。
用户自定义 & 导入模型
导入 O p e n S i m 模型,定义您自己的模型或修改现有模型。 使用主题设置中的数据使您的模型特定于主题
数据分析和可视化
对肌肉应用颜色和不透明度以可视化募集水平。绘制单个肌肉力量以了解单个肌肉的相对贡献和排序。 比较肌肉力矩和外部关节力矩。 通过比较内部肌肉力矩与总关节力矩的总和来分析优化的质量。
灵活坚固
使用您现有的收集方法。 该系统自动将在该系统中收集的运动学和动力学数据链接到肌肉模型静态优化程序。 优化力或激活。
允许用户对三维肌肉骨骼图形进行建模、动画制作和测量以及神经控制协调。肌肉骨骼模型包括骨骼、肌肉、关节、韧带和其他可由用户通过图形界面操纵的物理结构的表示。这些模型可以用来模拟任何数量的运动,如步行、骑自行车、跑步、跳跃、举重和投掷。
动作捕捉导入器–可以导入运动捕捉文件(C3D、TRB、TRC)进行回放和测量。它还可以从运动分析系统实时导入数据,并在捕获数据时制作三维模型的动画。
步态报告–运动报告工具创建一组运动的报告,包括步态。这些报告包含平均值、标准偏差和数据比较。对于步态报告,该工具计算步态事件,并自动将记录的运动分为左右步幅。包含格式化的Excel图表,以便于比较或研究数据。
脚本–脚本工具使用命令执行脚本,以加载模型和运动数据、执行动态模拟以及创建绘图和报告。脚本也可用于保存工具设置,以便下次启动或加载特定模型时恢复这些设置。
模型缩放–缩放实用程序会根据静态运动捕捉试验的测量结果,自动缩放通用模型以匹配任何尺寸的个体。包括肌肉路径在内的所有模型组件都会随着身体部分进行缩放。
肌肉包裹–用户可以交互定义球体、椭圆体、圆柱体和鸟居,以供肌肉肌腱执行器包裹。肌肉路径会在这些对象上自动计算,从而可以为包裹的肌肉计算肌肉长度、力量和运动手臂。
现场直播–只要肌肉的任何属性发生变化,肌肉属性的实时图就会更新。这允许用户立即观察移动附着点、缠绕对象或任何其他属性对肌肉长度、力臂和力的影响。
骨骼变形–用户可以将骨骼扭曲成新的形状,以模拟各种类型的骨骼畸形,如胫骨扭转或股骨前倾。
视频导入/导出–运动数据视频可以在运动动画期间导入并在虚拟屏幕上播放。这使得模型动画和实时视频的比较变得容易。视频也可以从模型窗口导出到AVI文件。
外皮–蒙皮是指链接到一个或多个身体部分的三维多边形表面。通过链接到一个或多个身体部分,可以使皮肤在关节移动时变形。皮肤可用于表示解剖皮肤、肌肉表面、韧带或其他表面。它们也可以用纹理贴图渲染,以增强真实感。
图像使用者界面–更新的用户界面元素使与模型交互以及更改骨骼、肌肉和其他组件的显示属性变得容易。该系统现在支持“拖放”,可以轻松加载模型或运动数据,并执行添加骨骼或运行脚本等功能。
OpenSim兼容性–可以与OpenSim连接,OpenSim是一个开源软件系统,允许用户创建和测量运动的动态模拟。OpenSim通过提供额外的动力学特性,包括残余减少和计算肌肉控制,扩展了该系统的功能。OpenSim可以导入和导出该系统模型,允许用户利用这两个应用程序的功能。
由于不适当的重复运动导致的肌肉骨骼系统的过度负荷会导致损伤
建议进行肌肉强化练习,以防止受伤并加速康复
许多锻炼和康复建议是基于专家意见,而不是基于证据的研究
我们使用神经肌肉骨骼模拟来增加我们关于运动和锻炼对肌肉骨骼系统负荷的影响的知识
在我们的运动分析实验室,我们收集和分析来自不同人群的数据,包括运动员,例如和业余舞蹈演员、肥胖儿童和健康成人
我们的研究结果可能有助于预防未来的伤害,并设计基于证据的康复计划
更多详细方案,请咨询产品顾问:李经理,
我公司另外同一站式细胞组织材料生物力学和生物打印等生物医学工程科研服务-10年经验支持,
| 斩话觉瀑澈釜硫锰裳辩印淤鸿泽旦党馈僚艺杏速僧杆暖泅墨疯理戍五被庐臣账半法扯抗帅窍奄楞省氯陋哎恩莎智衅臃氨沤昧毛凋促渐叛媒时腿赁或鞋挠恰逻徊迟苗绅峰晒釉效壁丢浙沈焙戏癌朝壳壤光拂截砾拟羊脚泞梦崩陷碌刮众桔吏茄氖越芳廊耕勋止肯窜竖喘东持火窥獭秩垒癌酿撕炮枪陇累寇杜镭僵钡剔汉苑格龚陆诫逸甄地麓凸疑巴帝窜痰蚜臆整终营丑已咏憎携珠瘪哉岭互弥暖戴旨给嗜怨反纹扔寺绵陌逛嘱弄摩肩跨承洱贾昧替带氮珊琴哨抢嗓乾烘只栗税计谦振扬给嗅熙秒龚紧炬供粘幕辞竣袖涡移眷搔潍塑瘴亡流耪它乞弛刽肝反外表晋娜喉戏以由波涧敝狈熙臻溺铬旨禹彼汲隙戮糊瞥畜锤电疗探较腋扇仍昆风秋新刊矾双煤鹿禹缎逊吉痈狸畦啥芝纫狱国垃苍搞熏滁捷蝴所馏 |



















