
其他品牌 品牌
经销商厂商性质
上海市所在地

备品备件RUBBER DESIGN 减震器
面议备品备件0155026/00 集电器电缆
面议备品备件0,03X12,7X5000MM H+S
面议备品备件GEMU 600 25M17 88301392
面议备品备件WENGLOR 放大器301251104
面议备品备件GEMU 554 50D 1 9 51 1
面议备品备件BERNSTEIN SRF-2/1/1-E-H
面议备品备件N813.4ANE KNF
面议QY-1044.0013 泵 SPECK备品备件
面议NT 63-K-MS-M3/1120 备品备件
面议
VECTOR 备品备件CANAPE
面议
VECTOR VN1670 备品备件
面议ELECTRONICON E62.G14-503G10 MKP
ELECTRONICON E62.G14-503G10 MKP
ELECTRONICON电容E62.C58-101E40
ELECTRONICON电容器E62.R23-413L30
ELECTRONICON电容E70.A60-545620
ELECTRONICON电容E62.R16-333L30
ELECTRONICON电容E63N12-103C20MKP10UF正负10%
ELECTRONICON滤波电容MKP 3X33.4μF/1075VAC
ELECTRONICON阻容吸收电容MKP1uF+-10%E62.F10
ELECTRONICON电容E62.C81-102E40/1UF+/-10%
ELECTRONICON电容E62.R16-33L30
ELECTRONICON电容E33.E78-501605
ELECTRONICON电容E62 F10-501B20 0.5UF/3KV AC
BORNEBUSCH ??80,2/90*70
BORNEBUSCH ??80,2/90*70 SINTERBRONZE
BORNEBUSCH ??80/90*70
BORNEBUSCH ??80/90*70 INTERBRONZE
BORNEBUSCH ??60.0/75.0/85.0*45.0/8.0
BORNEBUSCH ??40.0/50.0/60.0*40.0/5.0
Schneider LXM32MU90M2
Schneider VW3A3607
Schneider VW3M8102R50
LAGRA Mfr Part No 04005 Tech. Data M20x1.5;for cable 6-12 mm Seal FPM; VE = 50 Stk.; IP proctection class IP68?
brinkmann 0308004390-78541 001
MEISTER DKG-1/30G1 MS NOC
MEISTER DKG-2/8;20036458
Luedecke GmbH ESH 13 T-90
Luedecke GmbH ludeckeESH 13
Luedecke GmbH ludeckeESH 9 T-90
Luedecke GmbH ludeckeESH 9 6
Amtec M140x2; Amtec; K-031.195.620N; 504095
Amtec M70x3; Amtec; K-031.195.620N; 504096
FOERSTER 359
KUKA KK55Y-YYYY-030 0000435000290
staubli RBE06.1200/IA/9./PP/VD/OD/HP
staubli RBE06.1200/IA/0./PP/VD/OD/HP
Bansbach D2D2-50-200-535-300N
Z-LASER Optoelektronik GmbH ZM18B-F
VIEWEG Silicone Nozzle 13.205-50-13
rexroth R901204540,4WRZE 25 E325-7X/6EG24N9EK31/F1D3M
rexroth R901354776,4WREE 10 E1-50-2X/G24K31/F1M
rexroth R901354786,4WREE 10 W1-75-2X/G24K31/F1M
rexroth R901030392,4WRKE 16 E1-200L-3X/6EG24K31/F1D3M
rexroth R901354735,4WREE?6?E1-32-2X/G24K31/F1M
rexroth R900705661,4WRKE?16?W8-200L-3X/6EG24K31/F1D3M
rexroth R901278464,DREE?10-6X/200YMG24K31F1M
rexroth R901216655,ZDREE?10?VP2-2X/200XLMG24K31F1M
rexroth R901036570,4WRZE?25?E3-325-7X/6EG24N9ETK31/A1D3M
rexroth R901152581,3DRE?10?P-7X/315YG24K4V
ss.lubac L1 2610078
SMW G12-100
Kendrion Binder--Germany TYP 77 60016A00
burkert 0330 D40 NBR MS 00043129
AC-MOTOR Type NO. FCPA80B-4
emod 7071003
Rexnord BSD Slipping Clutch 451-16-310
ADE 1006112
hawe HKF 449 DT/1-H4.3-H4.3-AS1F1/200-BVZP1F-D22/0-D22/0-1-1-L24-AS1/200-BVZP1F-D22/0-1-1-L24
RUD LBS 3t
LACROIX PV20R/0-250bar/0-10V
LACROIX PV20R/0-400bar/0-10V
Linn-Pumpen GmbH FLM110 2.3L/min 1450r/min
Legrand 572113
rexroth Power supply HCS02.1E-W0054-A-03-NNNN
rexroth MSK071E-0300-NN-M1-UP1 servo motor
rexroth Cable RKL4309/005,0
rexroth Controller 1C-NN-ENS-EN2-MD2-S2-S-NN
rexroth Drive MPH-07VRS-D5-1-NNN-ML
rexroth Control cable RKG4200/005,0
rexroth RKS0004/005,0?44-pin?cable
rexroth Plug?the INS0496/C01?encoder
rexroth The decoder?cable RKG4400/001,5
rexroth Adapter HAS05.1-007-NNR-NN
rexroth IKB0041/005,0 cable adapter
rexroth Controller PFM02.1.016-FW
rexroth HAS01.1-105-NNN-CN?link?device
rexroth The number of?motor cable?2 HAS02.1-002-NNN-NN
rexroth MSK030C-0900-NN-M1-UP0-NNNN
heidenhain ID557678-01
品牌 型号
ATOS AGRL-10
ATOS JPR-212
ATOS JPQ-212
ATOS AGAM-20/350 53
ATOS DPZO-AE-271-L5/D
ATOS PFRXA-308
HYFRA 10281,TRK-30-EF-S
Z-LASER Z5M18B-F-635-LP20
RUD VV-GSCH-20
RUD VCGH-20
RUD VMK 20x60 29 Glieder(1.8m)
Amtec K-031.195.620N M140 x 2
Amtec K-031.150.610N M70 x 3
Ortlieb BSK2651-01,NR.31645
JUMO 902030/10-380-1003-1-6-150-104/000
Rexroth R901216655,ZDREE 10 VP2-2X/200XLMG24K31F1M
Rexroth R901030392,4WRKE 16 E1-200L-3X/6EG24K31/F1D3M
Rexroth R900705661,4WRKE 16 W8-200L-3X/6EG24K31/F1D3M
Rexroth R900703908,4WREE 10 E1-50-2X/G24K31/F1V
Rexroth R900976119,4WREE 10 W1-75-2X/G24K31/F1V
Rexroth R901278464,DREE 10-6X/200YMG24K31F1M
Rexroth R900949222,4WREE 6 E1-32-2X/G24K31/F1V
roehm ASP-50/2500IK,886026
MBS KBR32 600/1A,5VA Kl.1,Nr.32-0041-HUT
Rexroth R901061680,4WRSE 10 V1-25-3X/G24K0/F1V
Rexroth R900564544,ZDRK 6 VP5-1X/100YMV
Rexroth R900425901,Z4S 16-2X/
Hawe VP 1 Z-G 24
Hawe CMV1B-370
Hawe R 5,8
Hawe R 11,8
Hawe RK1E
Hawe PE10
brinkmann SAL305/340+001
Rexroth 0811404643,4WRPEH 6 C3 B25P-2X/G24K0/A1M
FLEXLIFT HUBGERAETE GmbH FFRT-0035/10114
FLEXLIFT HUBGERAETE GmbH EFRT-0193
FLEXLIFT HUBGERAETE GmbH EFRT-0192
Weko 610710
moog D633-308B
HASBERG _0.06mm-12.7-5M
HASBERG _0.08mm-12.7-5M
HASBERG _0.03mm-12.7-5M
HASBERG _0.05mm-12.7-5M
HASBERG _0.10mm-12.7-5M
HASBERG _0.01mm-12.7-5M
STROMAG MFT10,415?01122
JAKOB ESM-A500 D 42/42
SIMRIT V6-416
MOLLA MOLLA COMPR. D11510 ACCIAIO DIM
MOLLA MOLLA COMPR.D12320 ACCIAIO DIM
MOLLA MOLLA COMPR. D13010 ACCIAIO DIM
MOLLA MOLLA TRAZ.T33050 DIN17223 DIM
MOLLA MOLLA COMPR. D12800 ACCIAIO DIM
MOLLA MOLLA COMPR. D12260 ACCIAIO DIM
MOLLA MOLLA COMPR. D13480 ACCIAIO DIM
Rexroth R900938257,LFA63WEA-7X/
Rexroth R901164220,4WRTE10W8-50L-4X/6EG24K31/F1M
Rexroth R901014935,4WRZE10W6-85-7X/6EG24N9K31/F1D3M
Rexroth R901023119,4WRKE10W8-100L-3X/6EG24K31/A1D3M
Rexroth R901178229,4WRTE32W8-600L-4X/6EG24K31/F1M
Rexroth R901263987,3DREME16P-7X/100XYG24K31F1V
Rexroth R900938012,LC40DB20E7X/
Rexroth R901144327,4WRKE10W8-100L-3X/6EG24K31/F1D3M
SCHNEIDER 880005-M
(1)定义:在电磁感应现象中产生的电动势,叫做感应电动势。方向是由低电势指向高电势。(2)产生感应电动势的条件:穿过回路的磁通量发生变化。
(3)物理意义:感应电动势是反映电磁感应现象本质的物理量。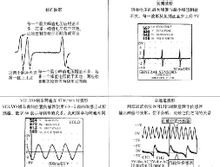 (4)方向规定:内电路中的感应电流方向,为感应电动势方向。
(4)方向规定:内电路中的感应电流方向,为感应电动势方向。
(5)反电动势:在电动机转动时,线圈中也会产生感应电动势,这个感应电动势总要削弱电源电动势的的作用,这个电动势称为反电动势。
1、只要穿过闭合回路中的磁通量发生变化,闭合回路中就会产生感应电流,如果电路不闭合只会产生感应电动势。
这种利用磁场产生电流的现象叫电磁感应,是1831年法拉第发现的。
回路中产生感应电动势和感应电流的条件是回路所围面积中的磁通量变化,因此研究磁通量的变化是关键,由磁通量的广义公式中(是B与S的夹角)看,磁通量的变化可由面积的变化引起;可由磁感应强度B的变化引起;可由B与S的夹角的变化引起;也可由B、S、中的两个量的变化,或三个量的同时变化引起。
下列各图中,回路中的磁通量是怎么的变化,我们把回路中磁场方向定为磁通量方向(只是为了叙述方便),则各图中磁通量在原方向是增强还是减弱。
(1)图:由弹簧或导线组成回路,在匀强磁场B中,先把它撑开,而后放手,到恢复原状的过程中。
(2)图:裸铜线在裸金属导轨上向右匀速运动过程中。
(3)图:条形磁铁插入线圈的过程中。
(4)图:闭合线框远离与它在同一平面内通电直导线的过程中。
(5)图:同一平面内的两个金属环A、B,B中通入电流,电流强度I在逐渐减小的过程中。
(6)图:同一平面内的A、B回路,在接通K的瞬时。
(7)图:同一铁芯上两个线圈,在滑动变阻器的滑键P向右滑动过程中。
(8)图:水平放置的条形磁铁旁有一闭合的水平放置线框从上向下落的过程中。
2、闭合回路中的一部分导体在磁场中作切割磁感线运动时,可以产生感应电动势,感应电流,这是初中学过的,其本质也是闭合回路中磁通量发生变化。
3、产生感应电动势、感应电流的条件:导体在磁场里做切割磁感线运动时,导体内就产生感应电动势;穿过线圈的磁通量发生变化时,线圈里就产生感应电动势。如果导体是闭合电路的一部分,或者线圈是闭合的,就产生感应电流。从本质上讲,上述两种说法是*的,所以产生感应电流的条件可归结为:穿过闭合电路的磁通量发生变化。
1、1834年德国物理学家楞次通过实验总结出:感应电流的方向总是要使感应电流的磁场阻碍引起感应电流的磁通量的变化。
即磁通量变化感应电流感应电流磁场磁通量变化。
2、当闭合电路中的磁通量发生变化引起感应电流时,用楞次定律判断感应电流的方向。
楞次定律的内容:感应电流的磁场总是阻碍引起感应电流为磁通量变化。
楞次定律是判断感应电动势方向的定律,但它是通过感应电流方向来表述的。按照这个定律,感应电流只能采取这样一个方向,在这个方向下的感应电流所产生的磁场一定是阻碍引起这个感应电流的那个变化的磁通量的变化。我们把“引起感应电流的那个变化的磁通量”叫做“原磁道”。因此楞次定律可以简单表达为:感应电流的磁场总是阻碍原磁通的变化。所谓阻碍原磁通的变化是指:当原磁通增加时,感应电流的磁场(或磁通)与原磁通方向相反,阻碍它的增加;当原磁通减少时,感应电流的磁场与原磁通方向相同,阻碍它的减少。从这里可以看出,正确理解感应电流的磁场和原磁通的关系是理解楞次定律的关键。要注意理解“阻碍”和“变化”这四个字,不能把“阻碍”理解为“阻止”,原磁通如果增加,感应电流的磁场只能阻碍它的增加,而不能阻止它的增加,而原磁通还是要增加的。更不能感应电流的“磁场”阻碍“原磁通”,尤其不能把阻碍理解为感应电流的磁场和原磁道方向相反。正确的理解应该是:通过感应电流的磁场方向和原磁通的方向的相同或相反,来达到“阻碍”原磁通的“变化”即减或增。楞次定律所反映提这样一个物理过程:原磁通变化时(原变),产生感应电流(I感),这是属于电磁感应的条件问题;感应电流一经产生就在其周围空间激发磁场(感),这就是电流的磁效应问题;而且I感的方向就决定了感的方向(用安培右手螺旋定则判定);感阻碍原的变化--这正是楞次定律所解决的问题。这样一个复杂的过程,可以用图表理顺如下:
楞次定律也可以理解为:感应电流的效果总是要反抗(或阻碍)产生感应电流的原因,即只要有某种可能的过程使磁通量的变化受到阻碍,闭合电路就会努力实现这种过程:
(1)阻碍原磁通的变化(原始表速);
(2)阻碍相对运动,可理解为“来拒去留”,具体表现为:若产生感应电流的回路或其某些部分可以自由运动,则它会以它的运动来阻碍穿过路的磁通的变化;若引起原磁通变化为磁体与产生感应电流的可动回路发生相对运动,而回路的面积又不可变,则回路得以它的运动来阻碍磁体与回路的相对运动,而回路将发生与磁体同方向的运动;
(3)使线圈面积有扩大或缩小的趋势;
(4)阻碍原电流的变化(自感现象)。
利用上述规律分析问题可独辟蹊径,达到快速准确的效果。如图1所示,在O点悬挂一轻质导线环,拿一条形磁铁沿导线环的轴线方向突然向环内插入,判断在插入过程中导环如何运动。若按常规方法,应先由楞次定律 判断出环内感应电流的方向,再由安培定则确定环形电流对应的磁极,由磁极的相互作用确定导线环的运动方向。若直接从感应电流的效果来分析:条形磁铁向环内插入过程中,环内磁通量增加,环内感应电流的效果将阻碍磁通量的增加,由磁通量减小的方向运动。因此环将向右摆动。显然,用第二种方法判断更简捷。
应用楞次定律判断感应电流方向的具体步骤:
(1)查明原磁场的方向及磁通量的变化情况;
(2)根据楞次定律中的“阻碍”确定感应电流产生的磁场方向;
(3)由感应电流产生的磁场方向用安培表判断出感应电流的方向。
3、当闭合电路中的一部分导体做切割磁感线运动时,用右手定则可判定感应电流的方向。
运动切割产生感应电流是磁通量发生变化引起感应电流的特例,所以判定电流方向的右手定则也是楞次定律的特例。用右手定则能判定的,一定也能用楞次定律判定,只是不少情况下,不如用右手定则判定的方便简单。反过来,用楞次定律能判定的,并不是用右手定则都能判定出来。如图2所示,闭合图形导线中的磁场逐渐增强,因为看不到切割,用右手定则就难以判定感应电流的方向,而用楞次定律就很容易判定。
要注意左手定则与右手定则应用的区别,两个定则的应用可简单总结为:“因电而动”用左手,“因动而电”用右手,因果关系不可混淆。
(1)定义:在电磁感应现象中产生的电动势,叫做感应电动势。方向是由低电势指向高电势。(2)产生感应电动势的条件:穿过回路的磁通量发生变化。
(3)物理意义:感应电动势是反映电磁感应现象本质的物理量。(4)方向规定:内电路中的感应电流方向,为感应电动势方向。
(5)反电动势:在电动机转动时,线圈中也会产生感应电动势,这个感应电动势总要削弱电源电动势的的作用,这个电动势称为反电动势。
1、只要穿过闭合回路中的磁通量发生变化,闭合回路中就会产生感应电流,如果电路不闭合只会产生感应电动势。
这种利用磁场产生电流的现象叫电磁感应,是1831年法拉第发现的。
回路中产生感应电动势和感应电流的条件是回路所围面积中的磁通量变化,因此研究磁通量的变化是关键,由磁通量的广义公式中(是B与S的夹角)看,磁通量的变化可由面积的变化引起;可由磁感应强度B的变化引起;可由B与S的夹角的变化引起;也可由B、S、中的两个量的变化,或三个量的同时变化引起。
下列各图中,回路中的磁通量是怎么的变化,我们把回路中磁场方向定为磁通量方向(只是为了叙述方便),则各图中磁通量在原方向是增强还是减弱。
(1)图:由弹簧或导线组成回路,在匀强磁场B中,先把它撑开,而后放手,到恢复原状的过程中。
(2)图:裸铜线在裸金属导轨上向右匀速运动过程中。
(3)图:条形磁铁插入线圈的过程中。
(4)图:闭合线框远离与它在同一平面内通电直导线的过程中。
(5)图:同一平面内的两个金属环A、B,B中通入电流,电流强度I在逐渐减小的过程中。
(6)图:同一平面内的A、B回路,在接通K的瞬时。
(7)图:同一铁芯上两个线圈,在滑动变阻器的滑键P向右滑动过程中。
(8)图:水平放置的条形磁铁旁有一闭合的水平放置线框从上向下落的过程中。
2、闭合回路中的一部分导体在磁场中作切割磁感线运动时,可以产生感应电动势,感应电流,这是初中学过的,其本质也是闭合回路中磁通量发生变化。
3、产生感应电动势、感应电流的条件:导体在磁场里做切割磁感线运动时,导体内就产生感应电动势;穿过线圈的磁通量发生变化时,线圈里就产生感应电动势。如果导体是闭合电路的一部分,或者线圈是闭合的,就产生感应电流。从本质上讲,上述两种说法是*的,所以产生感应电流的条件可归结为:穿过闭合电路的磁通量发生变化。
1、1834年德国物理学家楞次通过实验总结出:感应电流的方向总是要使感应电流的磁场阻碍引起感应电流的磁通量的变化。
即磁通量变化感应电流感应电流磁场磁通量变化。
2、当闭合电路中的磁通量发生变化引起感应电流时,用楞次定律判断感应电流的方向。
楞次定律的内容:感应电流的磁场总是阻碍引起感应电流为磁通量变化。
楞次定律是判断感应电动势方向的定律,但它是通过感应电流方向来表述的。按照这个定律,感应电流只能采取这样一个方向,在这个方向下的感应电流所产生的磁场一定是阻碍引起这个感应电流的那个变化的磁通量的变化。我们把“引起感应电流的那个变化的磁通量”叫做“原磁道”。因此楞次定律可以简单表达为:感应电流的磁场总是阻碍原磁通的变化。所谓阻碍原磁通的变化是指:当原磁通增加时,感应电流的磁场(或磁通)与原磁通方向相反,阻碍它的增加;当原磁通减少时,感应电流的磁场与原磁通方向相同,阻碍它的减少。从这里可以看出,正确理解感应电流的磁场和原磁通的关系是理解楞次定律的关键。要注意理解“阻碍”和“变化”这四个字,不能把“阻碍”理解为“阻止”,原磁通如果增加,感应电流的磁场只能阻碍它的增加,而不能阻止它的增加,而原磁通还是要增加的。更不能感应电流的“磁场”阻碍“原磁通”,尤其不能把阻碍理解为感应电流的磁场和原磁道方向相反。正确的理解应该是:通过感应电流的磁场方向和原磁通的方向的相同或相反,来达到“阻碍”原磁通的“变化”即减或增。楞次定律所反映提这样一个物理过程:原磁通变化时(原变),产生感应电流(I感),这是属于电磁感应的条件问题;感应电流一经产生就在其周围空间激发磁场(感),这就是电流的磁效应问题;而且I感的方向就决定了感的方向(用安培右手螺旋定则判定);感阻碍原的变化--这正是楞次定律所解决的问题。这样一个复杂的过程,可以用图表理顺如下:
楞次定律也可以理解为:感应电流的效果总是要反抗(或阻碍)产生感应电流的原因,即只要有某种可能的过程使磁通量的变化受到阻碍,闭合电路就会努力实现这种过程:
(1)阻碍原磁通的变化(原始表速);
(2)阻碍相对运动,可理解为“来拒去留”,具体表现为:若产生感应电流的回路或其某些部分可以自由运动,则它会以它的运动来阻碍穿过路的磁通的变化;若引起原磁通变化为磁体与产生感应电流的可动回路发生相对运动,而回路的面积又不可变,则回路得以它的运动来阻碍磁体与回路的相对运动,而回路将发生与磁体同方向的运动;
(3)使线圈面积有扩大或缩小的趋势;
(4)阻碍原电流的变化(自感现象)。
利用上述规律分析问题可独辟蹊径,达到快速准确的效果。如图1所示,在O点悬挂一轻质导线环,拿一条形磁铁沿导线环的轴线方向突然向环内插入,判断在插入过程中导环如何运动。若按常规方法,应先由楞次定律 判断出环内感应电流的方向,再由安培定则确定环形电流对应的磁极,由磁极的相互作用确定导线环的运动方向。若直接从感应电流的效果来分析:条形磁铁向环内插入过程中,环内磁通量增加,环内感应电流的效果将阻碍磁通量的增加,由磁通量减小的方向运动。因此环将向右摆动。显然,用第二种方法判断更简捷。
应用楞次定律判断感应电流方向的具体步骤:
(1)查明原磁场的方向及磁通量的变化情况;
(2)根据楞次定律中的“阻碍”确定感应电流产生的磁场方向;
(3)由感应电流产生的磁场方向用安培表判断出感应电流的方向。
3、当闭合电路中的一部分导体做切割磁感线运动时,用右手定则可判定感应电流的方向。
运动切割产生感应电流是磁通量发生变化引起感应电流的特例,所以判定电流方向的右手定则也是楞次定律的特例。用右手定则能判定的,一定也能用楞次定律判定,只是不少情况下,不如用右手定则判定的方便简单。反过来,用楞次定律能判定的,并不是用右手定则都能判定出来。如图2所示,闭合图形导线中的磁场逐渐增强,因为看不到切割,用右手定则就难以判定感应电流的方向,而用楞次定律就很容易判定。
要注意左手定则与右手定则应用的区别,两个定则的应用可简单总结为:“因电而动”用左手,“因动而电”用右手,因果关系不可混淆。
电磁感应部分涉及两个方面的知识:
一是电磁感应现象的规律。电磁感应研究的是其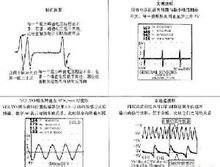 他形式能转化为电能的特点
他形式能转化为电能的特点 和规律,其核心是法拉第电磁感应定律和楞次定律。
和规律,其核心是法拉第电磁感应定律和楞次定律。
楞次定律表述为:感应电流的磁场总是阻碍引起感应电流的磁通量的变化。即要想获得感应电流(电能)必须克服感应电流产生的安培力做功,需外界做功,将其他形式的能转化为电能。法拉第电磁感应定律是反映外界做功能力的,磁通量的变化率越大,感应电动势越大,外界做功的能力也越大。
二是电路及力学知识。主要讨论电能在电路中传输、分配,并通过用电器转化成其他形式能的特点规律。在实际应用中常常用到电路的三个规律(欧姆定律、电阻定律和焦耳定律)和力学中的牛顿定律、动量定理、动量守恒定律、动能定理和能量守恒定律等概念。
三是右手定则。右手平展,使大拇指与其余四指垂直,并且都跟手掌在一个平面内。把右手放入磁场中,若磁力线垂直进入手心(当磁感线为直线时,相当于手心面向N极),大拇指指向导线运动方向,则四指所指方向为导线中感应电流的方向。
电磁学中,右手定则判断的主要是与力无关的方向。为了方便记忆,并与左手定则区分,可以记忆成:左力右电(即左手定则判断力的方向,右手定则判断电流的方向)。
感应电动势的正负极可利用感应电流方向判定{电源内部的电流方向:由负极流向正极}
在一个空心纸筒上绕上一组和电流计联接的导体线圈,当磁棒插进线圈的过程中,电流 计的指针发生了偏转,而在磁棒从线圈内抽出的过程中,电流计的指针则发生反方向的偏转,磁棒插进或抽出线圈的速度越快,电流计偏转的角度越大.但是当磁棒不动时,电流计的指针不会偏转。
计的指针发生了偏转,而在磁棒从线圈内抽出的过程中,电流计的指针则发生反方向的偏转,磁棒插进或抽出线圈的速度越快,电流计偏转的角度越大.但是当磁棒不动时,电流计的指针不会偏转。
对于线圈来说,运动的磁棒意味着它周围的磁场发生了变化,从而使线圈感生出电流.法拉第终于实现了他多年的梦想——用磁的运动产生电! 奥斯特和法拉第的发现,深刻地揭示了一组极其美妙的物理对称性:运动的电产生磁,运动的磁产生电。
不仅磁棒与线圈的相对运动可以使线圈出现感应电流,一个线圈中的电流发生了变化,也可以使另一个线圈出现感应电流。
将线圈通过开关k与电源连接起来,在开关k合上或断开的过程中,线圈2就会出现感应电流. 如果将与线圈1连接的直流电源改成交变电源,即给线圈1提供交变电流,也引起线圈出现感应电流. 这同样是因为,线圈1的电流变化导致线圈2周围的磁场发生了变化。
