




Siemens/西门子 品牌
代理商厂商性质
长沙市所在地
北京西门子V90变频器代理商
湖南合众博达科技有限公司是西门子自动化和驱动集团核心分销商(一级代理商)及系统集成商 西门子变频器 SINAMICS V90 点动控制简介 西门子变频器 SINAMICS V90 支持内部设定值位置控制,外部脉冲 位置控制,速度控制,扭矩控制;并且集合了脉冲输入,模拟量输入, 模拟量输出, 数字量输入, 数字量输出和编码器脉冲输出的各类接口。
为实现用户的控制需求实现方便快速的连接方式, 可以更好的与西门 子 PLC 进行集成,组成一套完整的控制系统。
在实际调试过程中, 点动操作是常见的一种控制方式, 本文下面对这款变频器的点动控制 做一个介绍,为用户在使用时参考。
西门子变频器 SINAMICS V90 在使用过程中,用户可以通过操 作面板进行点动控制,但有时会出现点动控制异常,原因及解决方法 如下: 1. 无法点动控制原因 西门子变频器 SINAMICS V90 通过操作面板进行点动控制,如 果无法进行,可能原因有: (1)V-Assist 调试软件处于在线状态; (2)伺服使能命令 SON 处于激活状态,即 SON = 1; (3)部分条件未能满足,例如:EMGS 信号处于低电平状态;驱动 器处于故障状态,并且具有故障代码;硬件连接未完成; 2. 解决方法 西门子变频器 SINAMICS V90 在通过面板操作时,如果不能进 行点动控制,可以参照如下的方法进行解决: (1)保持 V-Assist 软件处于离线状态;
上海庆惜自动化设备有限公司是西门子自动化和驱动集团核心分销商(一级代理商)及系统集成商 (2)去掉伺服使能命令,即 SON = 0; (3)满足其他所需条件, 例如: 保持 EMGS 信号为高电平, 即 EMGS = 1;排除设备当前故障,根据要求完成硬件的连接。
西门子变频器 SINAMICS V90 具有经济性好,伺服性能高,操 作简单,运行稳定的特点。
并且和 SIMOTICS S-1FL6 伺服电机配套 使用,可以组成理想的伺服控制系统,应用在印刷机,包装机等设备 上。
用户在调试过程中,如果需要通过控制面板对设备进行点动控制 时,可以参考本文中的说明进行操作并且合理配置。
1、概述
电机抱闸用于在伺服系统停止或断电时,防止停止运动负载的非预期运动。V90驱动器控制带抱闸的1FL6电机时,可直接控制电机的开抱闸动作。本文详细描述了V90伺服抱闸的接线及配置。
2、V90与电机抱闸间的接线
2.1 400V V90驱动器与高惯量系列1FL6电机抱闸接线
400V V90驱动器与高惯量系列1FL6带报闸电机之间的连接如图2-1所示。
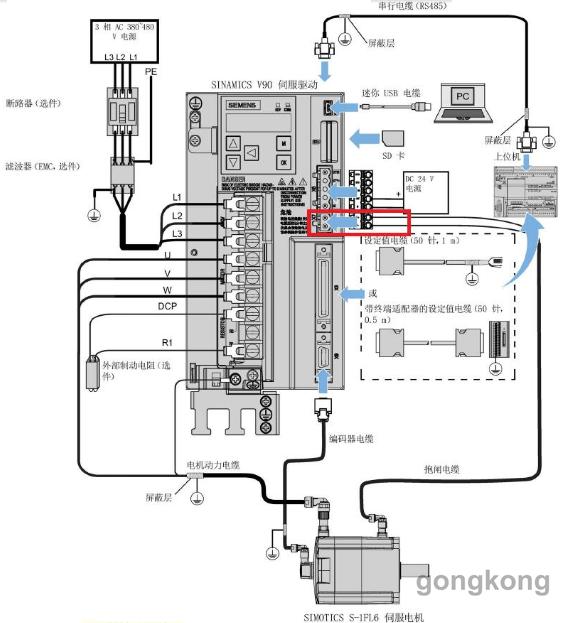
图2-1 400V系列V90驱动器与1FL6带报闸电机之间的连接
驱动器与电机间可以订购西门子抱闸电缆直接连接。
如果自制抱闸电缆则需订购电机侧的抱闸电缆接头,之后按照图2-2进行接线。
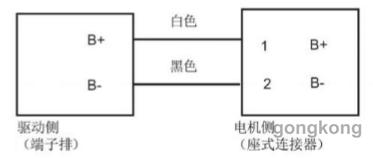
图2-2 400V高惯量系列V90抱闸接线
2.2 200V V90驱动器与低惯量系列1FL6带报闸电机之间的连接
200V V90驱动器内部没有集成抱闸继电器,需订购第三方的继电器用做抱闸
继电器。200V V90驱动器与高惯量系列1FL6带报闸电机之间的连接如图2-3所示。
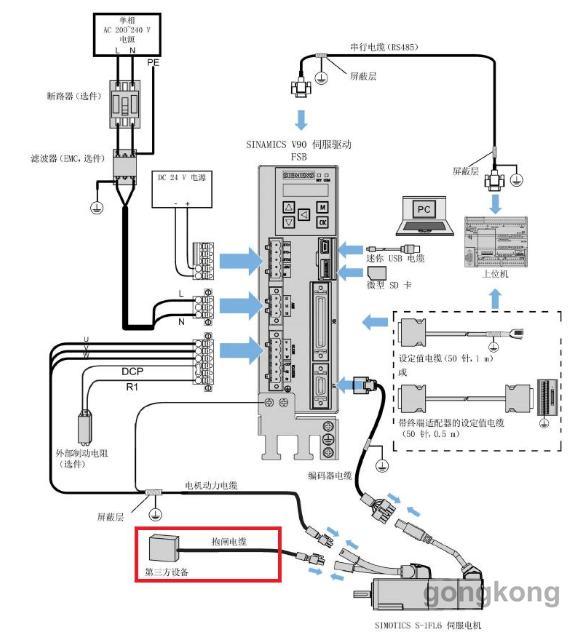
图2-3 200V V90驱动器与1FL6带报闸电机之间的连接
抱闸继电器的24V控制电压由外部提供,V90驱动器设定值电缆(50针插头) 中第
23脚(Brake)连接第三方继电器(抱闸继电器),控制其打开和关闭。连接示例如图
2-4所示。
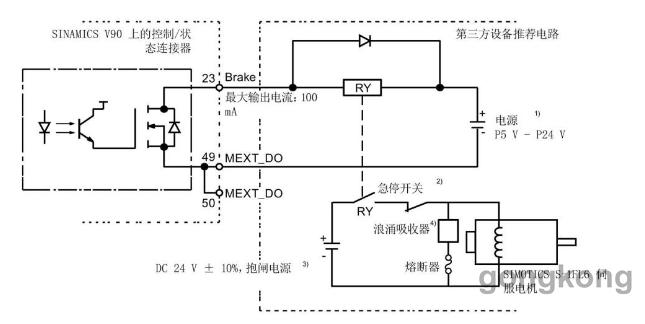
图2-4 200V低惯量系列V90抱闸接线
说明:
1) 隔离的数字输出电源。当使用DC24V电源时,它可以是控制器的供电电源。
2)电机抱闸不仅可以由SINAMICS V90 伺服驱动输出的抱闸控制信号控制,也可以由外部急停控制。
3)不能使用同一个电源给抱闸(DC24V)和抱闸控制信号(P24V)供电。
4)按图示安装浪涌吸收器可以抑制因继电器(RY)的接通/关闭操作产生的浪涌电压。当使用二极管时,需要注意制动器从释放到动作的时间比使用浪涌吸收器稍慢。
DO信号MBR指示抱闸的工作状态,如图2-4所示。
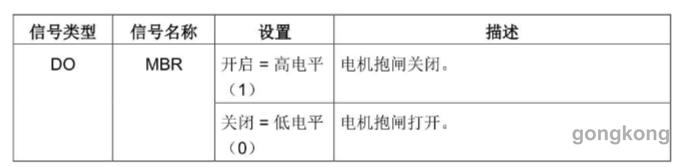
图2-4 抱闸状态指示
说明:MBR 仅为状态信号,因为电机停机抱闸的控制与供电均通过特定的端子实现。
3、电机抱闸参数配置
3.1相关参数
对于带增量编码器的1FL6电机,必须将电机铭牌上标注的ID输入到V90的P29000
参数中;而对于编码器电机,抱闸的工作方式会自动配置。
根据实际应用可通过参数p1215来配置抱闸。如果设置p1215=1,则电机抱闸在数
字量输入信号SON上升沿时打开,而在SON下降沿时关闭。参数p1216 和p1217 的默
认值取决于SINAMICS V90伺服驱动所配电机的额定功率。
对于 SINAMICS V90 200 V系列伺服驱动,实际的电机抱闸时间包括电机抱闸延迟
时间和电流放大器的延迟时间;可以通过下列方式设置 p1216 和 p1217 的值:
p1216 = 电机抱闸打开时间 + 继电器打开时间
p1217 = 电机抱闸闭合时间 + 继电器闭合时间
V90抱闸控制的相关参数如表3-1所示。
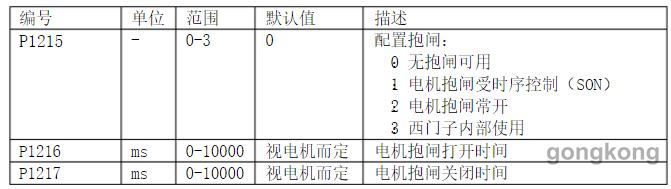
表3-1 V90抱闸相关参数
3.2抱闸控制时序
电机抱闸控制时序如图3-1所示。
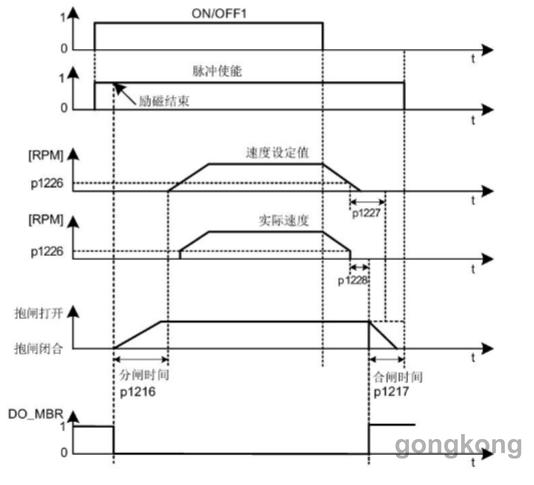
抱闸闭合时间从p1227(静态监控时间)和p1228 (脉冲清除延时)其中一个较
短的时间结束时开始计算。
 | 1FL6042-1AF61-0AA1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 增量编码器 TTL 2500 增量/转 带滑键 公差 N 无驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
| |||||||
| 1FL6042-1AF61-0AB1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 增量编码器 TTL 2500 增量/转 带滑键,公差 N 带驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
| |||||||
| 1FL6042-1AF61-0AG1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 增量编码器 TTL 2500 增量/转 光滑的轴,公差 N 无驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
| |||||||
| 1FL6042-1AF61-0AH1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 增量编码器 TTL 2500 增量/转 光滑的轴 公差 N 带驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
| |||||||
| 1FL6042-1AF61-0LA1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 编码器 20BIT (12 位多匝) 带滑键,公差 N 无驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
| |||||||
| 1FL6042-1AF61-0LB1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 编码器 20BIT (12 位多匝) 带滑键,公差 N 带驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
| |||||||
| 1FL6042-1AF61-0LG1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 编码器 20BIT (12 位多匝) 光滑的轴,公差 N 无驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
| |||||||
| 1FL6042-1AF61-0LH1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 编码器 20BIT (12 位多匝) 光滑的轴,公差 N 带驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
| |||||||
 | 1FL6042-1AF61-2AA1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 增量编码器 TTL 2500 增量/转 带滑键 公差 N 无驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
| 1FL6042-1AF61-2AB1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 增量编码器 TTL 2500 增量/转 带滑键,公差 N 带驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
| 1FL6042-1AF61-2AG1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 增量编码器 TTL 2500 增量/转 光滑的轴,公差 N 无驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
| 1FL6042-1AF61-2AH1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 增量编码器 TTL 2500 增量/转 光滑的轴 公差 N 带驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
| 1FL6042-1AF61-2LA1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 编码器 20BIT (12 位多匝) 带滑键,公差 N 无驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
| 1FL6042-1AF61-2LB1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 编码器 20BIT (12 位多匝) 带滑键,公差 N 带驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
| 1FL6042-1AF61-2LG1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 编码器 20BIT (12 位多匝) 光滑的轴,公差 N 无驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
| 1FL6042-1AF61-2LH1 SIMOTICS S-1FL6 工作电压 400V 3AC PN = 0.4kW;NN = 3000rpm M0 = 1.9Nm;MN = 1.27Nm 轴高度 45mm 编码器 20BIT (12 位多匝) 光滑的轴,公差 N 带驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V70&V90 |
| |||||
 | 1FL6042-2AF21-1AA1 SIMOTICS S-1FL6 工作电压 230V 3AC PN = 0.75kW;NN = 3000rpm M0 = 2.39Nm;MN = 2.39Nm 轴高度 40mm 增量编码器 TTL 2500 增量/转 带滑键 公差 N 无驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V90 |
| |||||
 | 1FL6042-2AF21-1AB1 SIMOTICS S-1FL6 工作电压 230V 3AC PN = 0.75kW;NN = 3000rpm M0 = 2.39Nm;MN = 2.39Nm 轴高度 40mm 增量编码器 TTL 2500 增量/转 带滑键 公差 N 带驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V90 |
| |||||
| 1FL6042-2AF21-1AG1 SIMOTICS S-1FL6 工作电压 230V 3AC PN = 0.75kW;NN = 3000rpm M0 = 2.39Nm;MN = 2.39Nm 轴高度 40mm 增量编码器 TTL 2500 增量/转 光滑的轴 公差 N 无驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V90 |
| |||||
| 1FL6042-2AF21-1AH1 SIMOTICS S-1FL6 工作电压 230V 3AC PN = 0.75kW;NN = 3000rpm M0 = 2.39Nm;MN = 2.39Nm 轴高度 40mm 增量编码器 TTL 2500 增量/转 光滑的轴 公差 N 带驻车制动器 防护等级 IP65 带密封圈 与变频器兼容 SINAMICS V90 | ||||||
<h2 "="" style="margin: 0px; padding: 0px; font-size: 28px;">西门子V90伺服回零设置

V90在EPOS模式下如何实现回零
1.V90驱动器连接增量编码器伺服电机主动回零
主动回零方式有2种:
1.1参考点挡块(信号REF)及编码器零脉冲,P29240=1。 通讯报文配置为111报文,通过FB284 SINA_POS进行回零操作:
1.1.1设置FB284工作模式: ModePos=4(homing – homing procedure)
1.1.2将参考点挡块输入信号连接到管脚ConfigEPos bit 6
1.1.3设置EnableAxis=1使能轴
1.1.4设置ExecuteMode=1执行回参考点
轴加速到速度p2605 搜索参考点挡块。当到达参考点挡块时(Pos_STW2.2:0→1),伺服电机减速到静止状态。此时,轴开始反向加速到速度p2608,当离开参考点挡块后(Pos_STW2.2:1→0),搜索编码器的零脉冲,当遇到编码器个零脉冲,轴反向加速以速度p2611 运行偏执距离 p2600 后停止在参考点,并将p2599设置成参考点的位置值,V90数字量输出信号 REFOK =1。
1.1.5回参考点完成后AxisRef状态变为1
1.2仅编码器零脉冲,P29240=2
通讯报文配置为111报文,通过FB284 SINA_POS进行回零操作:
1.2.1设置FB284工作模式: ModePos=4(homing – homing procedure)
1.2.2设置EnableAxis=1使能轴
1.2.3设置ExecuteMode=1执行回参考点
轴开始寻找零点位置,轴按照P2604定义的搜索方向,以加速度P2572加速至搜索速度P2608,搜索零脉冲, 搜索到零脉冲后,轴以速度P2611运行偏执距离 p2600 后停止在参考点,并将p2599设置成参考点的位置值,V90 数字量输出信号 REFOK =1。
1.2.4回参考点完成后AxisRef状态变为1
2.V90驱动器连接值编码器伺服电机
值编码器校准可通过以下三种方式:
2.1通过V-ASSISTANT软件设置
2.1.1设置参考点位置坐标值(P2599)
2.1.2执行设置参考点(P2507)
2.1.3执行保存参数到ROM
北京西门子V90变频器代理商
北京西门子V90变频器代理商

