




Siemens/西门子 品牌
代理商厂商性质
上海市所在地
西门子NCU数控主板6FC5357-0BB25-0AA0
用技术变量进行轴诊断
例如,在调试过程中改变轴的参数时,跟踪函数S7T Config可提供广泛的支持。
为了有效的实现跟踪函数,例如通过不同的设定值和真实值,建议您对CPU 31xT的设定值通道和控制结构有概括的了解。在此概述中演示了技术变量在哪里以及如何处理。
设定值通道
通常在叠加函数的情况下,设定值是由不同的组件构成 的。当然,决定性的问题是,例如,对跟踪记录是否分析其基本运动,叠加运动或所导致的整体运动。
通常基本运动的变量是在结构“basicMotion”中,而叠加运动的变量在结构“superimposedMotion”中。作为结果的设定值位置在结构“positioningState”中;速度和加速度在结构“motionState”中。
这些值会在运行系统级的IPO周期中更新(插补周期)。
图 1:设定值通道中的技术变量
对活动的轴运动的功能块作用于设定值通道的不同点。
基本函数
包含所有定位作业(例如:MC_MoveAbsolute)。它们只作用于轴的基本运动。当启动一个基本函数时,所有运行的基本和叠加作业都会终止。然后平稳过渡到新作业。当叠加运动中止时,所有叠加变量的位置,速度和加速度的当前值都 被用来计算basicMotion的启动条件中。
叠加函数
只有FB MC_MoveSuperImposed。此函数的启动对运行的基本函数没有影响。
在基本系统中的同步操作
基本系统中同步操作的FB用来启动,改变或终止驱动器或凸轮的同步操作。这里设定值不直接在轴里而是在的同步操作对象中被影响。从那里输入轴的basicMotion结构。当在基本系统中启动同步操作时,所有运行的运动由于基本函数而被终止。
在叠加系统中的同步操作
叠加同步操作函数对第二个同步操作对象有影响。当启动这样一个函数时,它对基本函数没有影响。但运行的MC_MoveSuperImposed作业被取代。
当作业被取代时的上述现象是标准设置,它可通过特殊应用的专家列表更改。
控制结构
轴位置控制所需的函数在运行系统级“Servo”中运行。分析所需的变量主要在结构“servodata”中。
取决于所使用的驱动器,有两个位置控制步骤可用:
位置控制发生在CPU中。由于通信延时在位置控制循环中有长的停止时间。
所连接的驱动器支持DSC程序。这里位置控制发生在驱动器中。使用这一程序也可实现高动态的应用。
对于CPU 317T或CPU 315T,由于驱动器只是通过PROFIBUS进行分散的连接,必须考虑通信延时。由此在CPU中,设定值和实际位置总是来自不同的扫描时间。这两个值的简单不同不能给出 实际跟踪误差。
伺服块(图2)将设定值作为输入。在此简化视图中,未考虑一般限制和过滤器函数。

图2:CPU中的位置控制(简化结构)
设定值位置可包含针对相关轴DB或结构positioningState的变量的偏移。如果在运行操作中设置或修正位置值,偏移量就会改变,因为没有在伺服块中使用 位置修正。
速度预控值来自设定值位置和kpc加权的区别(.NumberOfDataSets.DataSet1.ControllerStruct.PV_Controller.kpc)。补偿值也可开始作用,例如通过摩擦补偿(临时 的补充设定值以克服静态摩擦)。
为了检查预控或正确缩放的效果,可以大量减小位置控制的影响。为此必须将位置控制增益kv设置到非常低的值。这个测试程序不考虑位置控制发生在CPU还是驱动器中。
位置设定值通过一个对称过滤器,其对标准应用的过滤时间常数设定为非常小几乎就是无效的值(<< 20ms)。 使用此过滤器可以优化高速动态应用中位置控制的过火行为。过滤器只在使用预控制时有效。
CPU中的位置控制
如果位置控制发生在CPU中,那么位置控制器(servodata.ControllerOutput)的输出就是位置差servodata.controllerDifference和位置控制增益kv的结果。位置控制器的输出被加入到预控制 ,并作为速度设定值传递到驱动器。
DSC过程
在DSC过程中(图 3 )速度预控(NSOLL_B),位置控制增益(KPC)以及设定值位置和实际位置(XERR)间的差异作为位置控制的相关信号被发送到驱动器。驱动器从XERR信号中形成实际位置设定值。位置控制发生在驱动器中。
图3:使用DSC过程的位置控制结构(简化结构)
可在控制器中仿真使用DSC过程的有效跟踪误差“servodata.followingError”。
用跟踪函数观测技术变量
使用S7T Config的跟踪工具可记录并存储信号路径和技术变量的值。可在图表中显示并编辑记录的测量值。
在启动跟踪工具前,必须将S7T Config设为在线模式并将技术变量加载到PLC。
在浏览器中选中技术变量,并选择菜单命令PLC > Trace,来启动跟踪工具。通过Trace signal selection(图 4 )选择技术变量并将其分配到记录通道。
图4:选择技术变量(跟踪)
S7-1200 的通讯伙伴
S7-1200 可以通过集成的 PN 口与以下设备进行通讯:
其他 S7 CPU (S7-200, S7-300, S7-400, S7-1200, S7-1500)
编程设备
HMI 设备 (例如:SIMATIC 精简面板和 SIMATIC 精智面板)
支持开放式用户通信的设备
支持的大同步、异步通信连接数量
S7-1200 CPU 支持的大同步、异步通讯连接数量如下所示:
| 连接类型 | 描述和大连接数量 |
开放式用户通讯 | S7-1200 CPU 通过以下指令支持 8 个开放式用户通讯连接(主动或者被动): T_SEND_C, T_RECV_C, TCON, TDISCON, TSEND 和 TRECV。 注意 |
| S7 通讯 |
|
| HMI 连接 | 固件版本 V2 和V3 S7-1200 CPU 提供专门的 HMI 连接,支持 多3 个HMI设备。 固件版本 V4 V4或者更高固件版本的S7-1200 CPU 支持多12个HMI 连接。根据 HMI 设备类型和功能使用模式,每个 HMI 设备实际需要1,2或3个连接资源。这里可以保证支持4个HMI 设备而不必关心可用的连接资源数量。同时连接超过4个HMI设备也是可能的。 |
| PG 连接 | S7-1200 CPU 支持 1 个编程设备 (PG) 连接。 |
| Web 服务器连接 (HTTP) | S7-1200 CPU 支持 Web 服务器连接。 |
表1
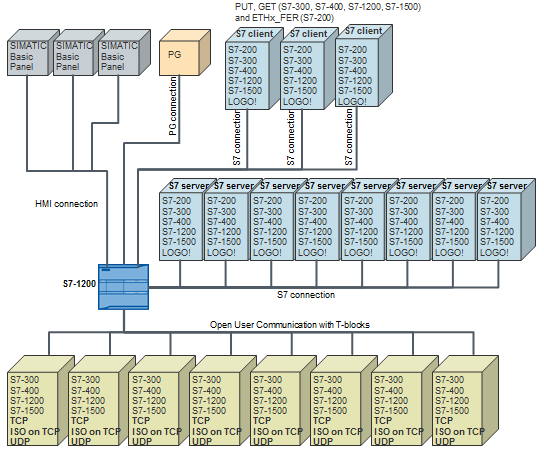
图. 01
PROFINET 和 PROFIBUS
固件版本 V2.02 到 V2.2 的 S7-1200 CPU
对于 PROFINET,S7-1200 多支持 8 个 PROFINET IO 设备和 128 个子模块,二者以先满足者为准。对于 PROFIBUS 每个 DP 主站多支持 16 个 DP 从站,每个 DP 从站多 256 个子模块。 DP 从站和 IO 设备的总数多支持 16 个 。
固件版本 V3.0 或者更高版本的 S7-1200
S7-1200 从固件版本 V3.0 起支持 16 个PROFINET IO 设备,多 256 个子模块。PROFIBUS 支持 32 个从站,每个 DP 从站多 512 个子模块。
S7-1200 的 集成 PROFINET 接口
S7-1200 CPU集 成的 PROFINET 接口是 RJ45 插口。
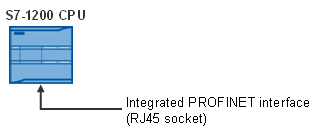
图. 02
S7通信是S7系列PLC基于MPI、PROFIBUS、ETHERNET网络的一种优化的通信协议,主要用于S7300/400PLC之间的通信。SIMATIC S7- PN CPU包含一个集成的 PROFINET 接口,该接口除了具有 PROFINET I/O功能,还可以进行基于以太网的S7通信。SIMATIC S7- PN CPU支持无确认数据交换、确认数据交换和单边访问功能。功能块的调用如图1、图2所示。
| 块 S7-400 | 块 S7-300 | 描述 | 简要描述 |
| SFB 8 | FB 8 | 用于发送 | 无确认的快速数据交换,发送数据后无对方接收确认。 |
| SFB 9 | FB 9 | 用于接收 | |
| SFB 12 | FB 12 | 用于发送 | 确认数据交换,发送数据后有对方接收确认。 |
| SFB 13 | FB 13 | 用于接收 | |
| SFB 14 | FB 14 | 读数据 | 单边编程读访问。 |
| SFB 15 | FB 15 | 写数据 | 单边编程写访问。 |
表1
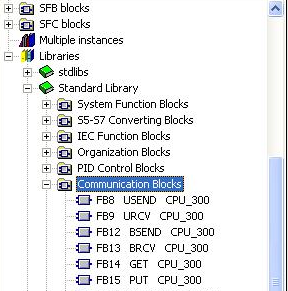
图1
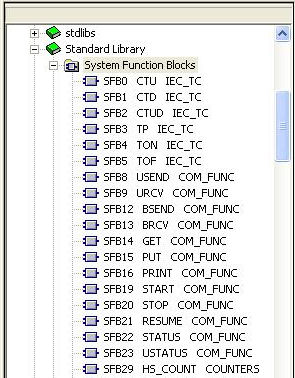
图2
要通过 S7-PN CPU 的 集成PROFINET 接口实现S7 通信,需要在硬件组态中建立连接。
2. 硬件及网络组态
CPU采用两个315-2PN/DP,使用以太网进行通信。
在STEP7中创建一个新项目,项目名称为PN S7。插入两个S7-300站,在硬件组态中,分别插入CPU 315-2 PN/DP。如图3所示。
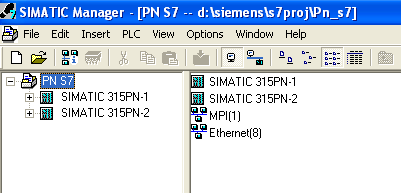
图3
新建以太网,打开“NetPro”设置网络参数,选中CPU,在连接列表中建立新的连接。如图4所示。
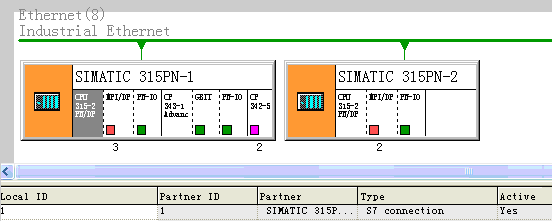
图4
然后双击该连接,设置连接属性。在“General”属性中块参数ID = 1,这个参数即是下面程序中的参数“ID”。在SIMATIC 315PN-1中激活“Establish an active connection”,作为Client端,SIMATIC 315PN-2作为Server 端。
3. 软件编程
3.1. 无确认数据交换
SFB/FB 8 "USEND" 向类型为“URCV”的远程伙伴SFB/FB发送数据。执行发送过程而不需要和SFB/FB伙伴进行协调。也就是说,在进行数据传送时不需要伙伴SFB/FB进行确认。
S7-300:在REQ的上升沿处发送数据。在REQ的每个上升沿处传送参数R_ID、
ID和SD_1。在每个作业结束之后,可以给R_ID、ID和SD_1参数分配新数值。
S7-400:在控制输入REQ的上升沿处发送数据。通过参数SD_1到SD_4来指向要
发送的数据,但并非都需要用到所有四个发送参数。
然而,必须确保参数SD_1到SD_4/SD_1和RD_1到RD_4/RD_1 (在相应通讯伙
伴SFB/FB "URCV" 上)所定义的区域在以下几个方面保持*:
? ?编号
? ?长度
? ?数据类型
参数R_ID必须在两个SFB中*相同。如果传送成功完成,则通过状态参数DONE来表示,此时其逻辑数值为1。
SFB/FB 9 "URCV" 从类型为“USEND”的远程伙伴SFB/FB中异步接收数据,并
把接收到的数据复制到组态的接收区域内。
当程序块准备好接收数据时,EN_R输入处的逻辑值为1。可以通过EN_R=0来取
消一个已激活的作业。
S7-300:在EN_R的每个上升沿处应用参数R_ID、ID和RD_1。在每个作业结束
之后,可以给R_ID、ID和RD_1参数分配新数值。
S7-400:通过参数RD_1到RD_4来指向接收数据区。
必须确保参数RD_i/RD_1和SD_i/SD_1 (在相应通讯伙伴SFB/FB "USEND"
上)所定义的区域在以下几个方面保持*:
?? 编号
? ?长度
? ?数据类型。
通过NDR状态参数逻辑数值为1来指示已经成功完成复制处理过程。参数R_ID必须在两个SFB/FB上*相同。
打开SIMATIC 315PN-1的OB1,在OB1中依次调用FB8,FB9如图5、图6所示:
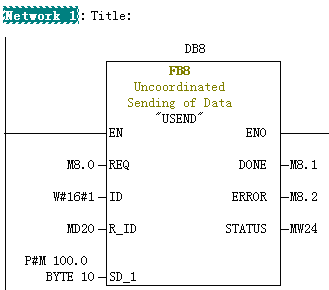
图5
程序中的参数说明见表2
| 参数 | 描述 | 数据类型 | 存储区 | 描述 |
| REQ | INPUT | BOOL | I、Q、M、D、L | 上升沿触发工作 |
| ID | INPUT | WORD | M、D、常数 | 连接ID |
| R_ID | INPUT | DWORD | I、Q、M、D、L、常数 | 连接号,相同连接号的功能块互相对应发送/接收数据 |
| DONE | OUTPUT | BOOL | I、Q、M、D、L | 为1时,发送完成 |
| ERROR | OUTPUT | BOOL | I、Q、M、D、L | 为1时,有故障发生 |
| STATUS | OUTPUT | WORD | I、Q、M、D、L | 状态代码 |
| S7-300: SD_1 S7-400: SD_i (1 ≤ i ≤ 4) | IN_OUT | ANY | M、D、T、Z I、Q、M、D、T、C | 发送数据区 |
表2 FB8参数说明
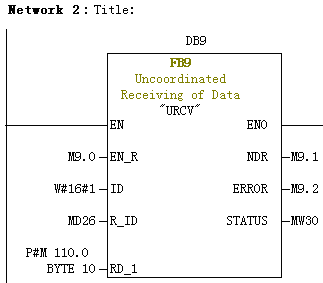
图6
程序中的参数说明见表3
| 参数 | 参数 | 数据类型 | 存储区 | 描述 |
| EN_R | INPUT | BOOL | I、Q、M、D、L、常数 | 为1时,准备接收 |
| ID | INPUT | WORD | M、D、常数 | 连接ID |
| R_ID | INPUT | DWORD | I、Q、M、D、L、常数 | 连接号,相同连接号的功能块互相对应发送/接收数据 |
| NDR | OUTPUT | BOOL | I、Q、M、D、L | 为1时,接收完成 |
| ERROR | OUTPUT | BOOL | I、Q、M、D、L | 为1时,有故障发生 |
| STATUS | OUTPUT | WORD | I、Q、M、D、L | 状态代码 |
| S7-300: RD_1 S7-400: RD_i (1 ≤ i ≤ 4) | IN_OUT | ANY | M、D、T、Z I、Q、M、D、T、Z | 接收数据区 |
表3 FB9参数说明
西门子NCU数控主板6FC5357-0BB25-0AA0
2、 逻辑控制模块 LOGO!
内置 HMI:MiniWeb_linemb_systemconfiguration.ini(828D 使用及 840Dsl TCU+NCU 配置)
Win7 操作系统:MiniWeb_win7_systemconfiguration.ini(840Dsl PCU+NCU 配置,Win7
平台)
Xp 操作系统:MiniWeb_winxp_systemconfiguration.ini(840Dsl PCU+NCU 配置,WinXP
平台)
第 11 章 功能
11.2 OPC-UA 数据访问
拷贝配置样例文件到 HMI 数据设置制造商目录下
实际上文件拷贝到 CF/oem/Sinumeirk/hmi/cfg 目录下。
例:使用内置 HMI,拷贝 MiniWeb_linemb_systemconfiguration.ini 文件
更改文件名称为 systemconfiguration.ini。
选择文件,点击属性 ,修改文件名称为 systemconfiguration.ini.
4) 配置 MiniWeb Server 的 IP 地址
模板的文件:第 11 章 功能
11.2 OPC-UA 数据访问
控制器6FC5357-0BB24-0AA0 现货

400,
11-7
拷贝模板文件到系统 CF/oem/SINUMERIK/hmi/miniweb/WebCfg 目录下
在 OPC_UAApplication.xml 文件中配置 Server 的 IP 地址
文件中已经说明,使用 X130 的 IP 地址,替换文件中所有的 localhost,总共有 3 处。
替换完毕的文件:
5) 激活 OPC UA 服务器
选择 -〉 -〉 ,设置管理员及密码,并激活 OPC UA。
系统重新上电,生效。
第 11 章 功能
11.3 驱动器
11-8
6) 测试 OPC-UA 服务器
使用 OPC UA 客户端测试接系统,客户端测试软件可以自行在网上下载,也可以在 OPC
服务器的时候,就说明在 Operate 上配置的服务器已经生效了。












