



其他品牌 品牌
经销商厂商性质
上海市所在地
上海壹侨正品保证瑞士BUCHER QX52-040R66 上海壹侨正品保证瑞士BUCHER QX52-040R66
BUCHER 200101213205 AP100/1,7 D 818
BUCHER VSV5-1/1 ON-CLOSE +3000307815
BUCHER QX52-063R66-O
BUCHER QX51-100/33-010R09
BUCHER 400561665 SDRB-P-10-SM
BUCHER QX52-063R66, ARTIKEL: 100040271 (整单有效)
BUCHER 200101213205 AP100/1,7 D 818
BUCHER QX41-050R09
BUCHER QX31-025/22-005R
BUCHER TM 62301 24V
BUCHER 28005 XFD50RH-AHD 11-284 F
BUCHER QXV26-005R
BUCHER QX53-063R
BUCHER 100021878 WV06-6/2-HE*-2M18G24
BUCHER LRS100-250V DC
BUCHER QX22-005R
BUCHER QX31-020R06
BUCHER AP05/0,25 D 810, ARTIKEL: 200100261204
BUCHER CINDY-16-B-PTD-S150-L-D25-2-SVT320
BUCHER QX22-005R
BUCHER 400562474 SWDRVPD-5DO-10-P-E-6 24D
BUCHER QX52-040R66, ARTIKEL: 100017914
BUCHER 280005-XFD50RH-AHD
BUCHER QX52-063R66, ARTIKEL: 100040271 (整单有效)
BUCHER 400307577, LRSA 100-250V DC
BUCHER QX22-008R
BUCHER 100021878 WV06-6/2-HE*-2M18G24
BUCHER CINDY-20-B-SNS-S100-A-K16-1
BUCHER QX52-040R66
BUCHER SNS-S060-L-15-SVZ200-B
BUCHER RS32-330
BUCHER VSV5-2/2 OFF-TRIP
BUCHER 301R5043026, ER-81-60S-1Z
BUCHER 300601028400004 CINDY 20-B-SVD-S100-L-H21-1-SVT250
BUCHER 原型号已停产,推荐型号: QX43-032R (性能很好,尺寸有略微差别, 有资料)
BUCHER IDENT-NO.: 301RC010304ET, PRV-DREPW6CCA/00E26
BUCHER APM200/15-AP200/11.S10 200122522602
BUCHER QX43-025R
BUCHER QX22-005R
BUCHER RS32-330
BUCHER WEVDK-42-A-NP-6 5380
BUCHER QX52-063R66
BUCHER 300601085500003 CINDY 16-B-PTD-S150-L-D25-2-SVT320
BUCHER QX53-63R
BUCHER 400561665 SDRB-P-10-SM
BUCHER WEVDK-42-A-NP-6 5380
BUCHER UP100K1G201
BUCHER DWPBU-2-10-SM20-1
BUCHER QX52-063R66-O
BUCHER IDENT-NO.: 301RC010301ET, DCV-WEZPW6C08COA/00E27 (整单有效)
BUCHER QX31-020R06
BUCHER QX52-040R66, ARTIKEL: 100017914
本方案采用双排C型铝合金轨道与移动平台小车配合,平台小车下法兰连接硬臂式机械手。使整个设备在轨道行程内平稳行走。C型轨道采用进口材料,强度、精度高。
非金属滚轮采用高强度耐磨尼龙材料加工而成,使用寿命长。
a) 可实现不同重量物料的重力平衡状态,适用于物料的精确移载操作。
b) 空载、满载及处理不同工件时,系统可感知其重量变化,并实现载荷在三维空间中的浮动状态,便于精确定位。
c) 全程平衡、运动顺滑等特点,使得操作者可以很便捷地实现工件的搬运、定位、装配等操作。
d) 刚性手臂可使机械手带工件越过障碍;水平臂可满足物料在相关场所进行横向放入、横向取出等动作要求。
e) 系统可始终保持机械手头部的水平,发挥高作业性。
f) 关节刹车装置,具有多个回转关节,以实现广域范围内的物料取置;配备有刹车装置,操作者可在操作过程中随时中断机械手的运动。
a) 主机控制与夹具(机械手)集成为一体,方便操作者双手控制工件。主机操作按钮都集成于夹具控制面板上,控制部分及指示灯、指示器等按人体工学原理布置,便于操作及紧急情况的处理。
执行部分是机械手上承担抓(或吸)取物件的机构,由手指、传力(或增力)机构和动力装置等组成。
手指是手部中直接承担抓(或吸)取物件的元件。
1、手指的抓取机能
助力机械手的手指的抓取机能是由被抓取物件和手指决定的。被抓取物件的大小、形状、重量、材质和受外力的约束程度及运动(抓取运动的物件)情况,决定了手指是的大小、形状、个数、种类配置和动作,而这些又决定了手指的抓取机能(即该手指能抓取的极限尺寸;手指对物件的约束和握紧程度;抓取精度-定位精度等)。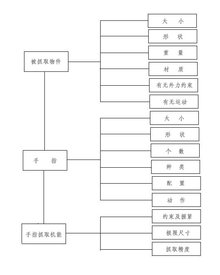 手指抓取机能与手指、被抓取物件的关系
手指抓取机能与手指、被抓取物件的关系
2、手指的种类
机械手的手指有机械式和吸盘式两种形式。人手抓取物件时,手指常与手掌相对握紧。机械式手指没有手掌,全靠手指握紧物件;而吸盘式手指则刚好相当于只有手掌吸附物件。机械式手指的应用比较广泛。
机械式手指常按指根的动作及手指的数目或手指的形状进行分类。
(1)按指根的动作不同分类
回转型手指:手指的张开与闭合是靠指根的回转动作完成的。无关节手指的本体是一个直构件;固定关节指的本体是一个弯构件,即在指的中间处形成一个"V"形关节角;而自由关节指的本体在中间分开,指根与指尖是由铰链连接的。
直进型手指:手指的张开与闭合是靠手指的直接动作完成的。这种手指也可分为无关节指和自由关节指。有时还把无关节指、固定关节指、自由关节指相互组合而成为混合手指。
(2)按手指抓取部分的形状分类
有圆弧形的、锯齿形的、钩形的和平板形的等等。
3、典型表面与手指的接触状态
虽然被抓取物件的形状和尺寸是多种多样的,但是从抓取的角度来看,可将被抓取部位的形状分成圆柱形、正方柱形、板形、球形和圆锥形等5种典型表面。各种手指在抓取这5种典型表面时的接触状态是各不相同的,根据这时的接触状态,即可对不同形状和数量的手指及其抓取机能进行分析和比较,以便从中选出合理的指形和手指个数。
a) 设置有元件保护盒, 助力机械手以保护主要精密气动元器件,避免操作时意外撞击及灰尘沉积。气路排布*按丰田AMS标准执行,方便维修。
助力机械手以保护主要精密气动元器件,避免操作时意外撞击及灰尘沉积。气路排布*按丰田AMS标准执行,方便维修。
b) 系统配备二联件、单向阀和储气罐,为系统提供持续稳定的压缩空气,当主供气源意外断气时,可提供一定时间的安全保障,并使系统有足够的动力完成本次操作或将工件卸载。
a) 配备有负载显示器,指示负载状态,告知操作者:此时物料是否可被提起或被卸载。当系统处于负载状态时,显示器呈红色。
b) 配备有负载压力表,指示压缩空气工作状况。
c) 配备有安全误操作保护装置,防止误动作对人身或设备造成伤害;在操作者未对安装状况进行确认前,即工件未安装到位前,如果工人误操作松开按钮,工件不能被卸载(限于动力夹具)。
d) 系统配备了失气保护装置,当主供气源意外断气时,主机臂杆不能动作,机械手停止作业,避免意外的伤害。
e) 设备配套安全控制系统,在操作时,系统不会因为误动作,而突然改变负载或空载压力,因此机械手不会因此快速上升或下降而对人身、设备和产品造成伤害。













